

Knee joint driven by flexible driver
A flexible driver and knee joint technology, applied in the field of bionic robots, can solve problems such as difficult control, large hysteresis, and low driving speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be described below with reference to the accompanying drawings.
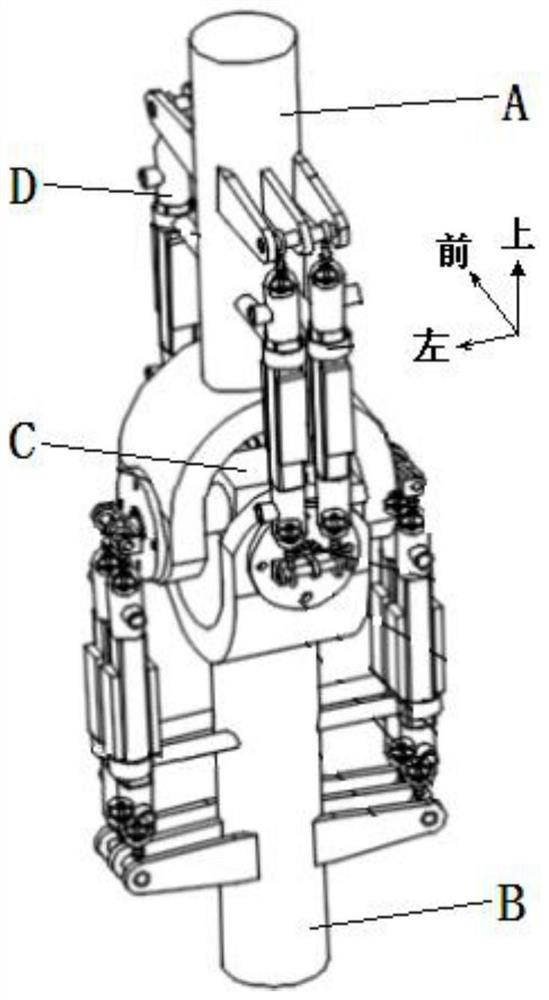
[0054] like figure 1 , Figure 18 and Figure 19 As shown, the present invention consists of a bionic femur A, a bionic tibia B, a bionic cruciate ligament C, and a flexible actuator D, wherein the bionic femur A and the bionic tibia B are arranged up and down, and the bionic cruciate ligament C is located at the bionic femoral condyle 29 and the bionic femur A of the bionic femur A. Between the bionic tibial condyles 38 of the tibia B.
[0055] The outer ring of the anterior bearing 14 in the artificial cruciate ligament C is connected with the anterior hole 52 of the bionic tibia B; the outer ring of the middle and posterior bearing 16 of the artificial cruciate ligament C is connected with the middle and posterior hole 37 of the bionic tibia B by interference; the middle left of the artificial cruciate ligament C The outer ring of the bearing 15 is connected with the left h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More