Binocular vision inertia odometer method utilizing parallel computing acceleration
A binocular vision and parallel computing technology, applied in the field of positioning, can solve the problems of partial acceleration of image processing, no use of positioning accuracy pose estimation, no speed improvement, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] The present invention proposes a binocular visual-inertial odometer method accelerated by parallel computing. The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
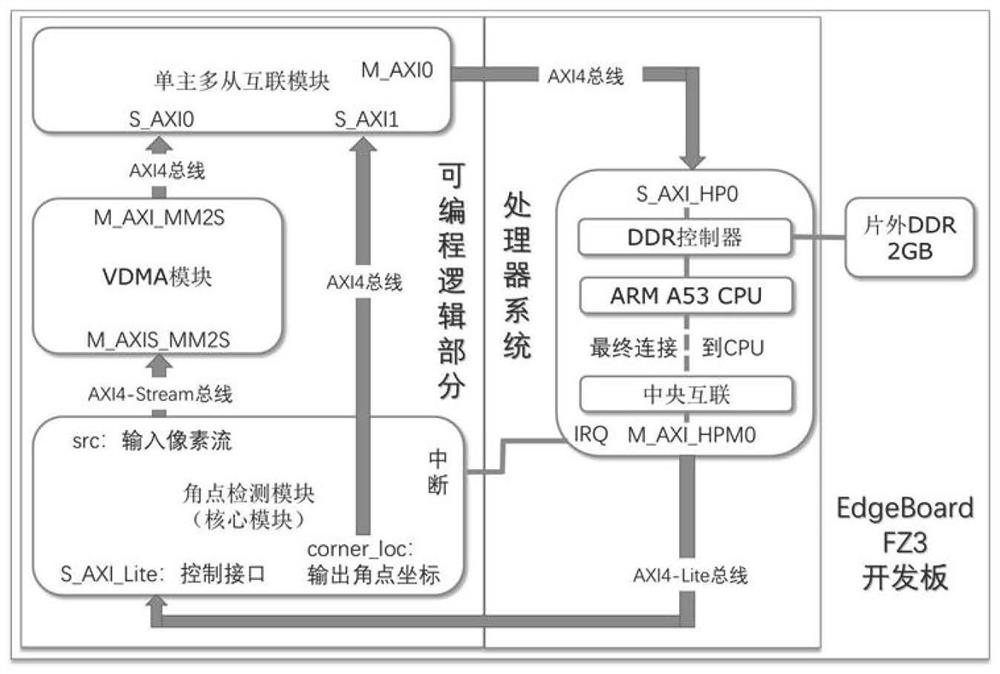
[0095] The present invention proposes a binocular visual inertial odometer method accelerated by parallel computing, and the embodiment is deployed on the EdgeBoard FZ3 development board. The development board is 80mm long and 70mm wide. It is equipped with Xilinx Zynq UltraScale+MPSoCs (ZU3) series chips (model XAZU3EG-1SFVC784I). The processor has built-in quad-core ARM Cortex-A53 and programmable logic modules. 2GB.
[0096] In order to enable the development board to run the binocular visual inertial odometer in real time, this embodiment uses a quad-core ARM Cortex-A53 processor and a programmable logic block to perform calculations, wherein the ARM processor system undertakes step 1 in this method ), step 3) to step 21) of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com