

Five-degree-of-freedom robot capable of being used for hardware grinding
A degree of freedom and robotic technology, applied in the field of robotics, can solve the problems of poor stiffness, poor dynamic characteristics, and low precision of cantilever structures, and achieve the effects of good stiffness, high precision, and good dynamic characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
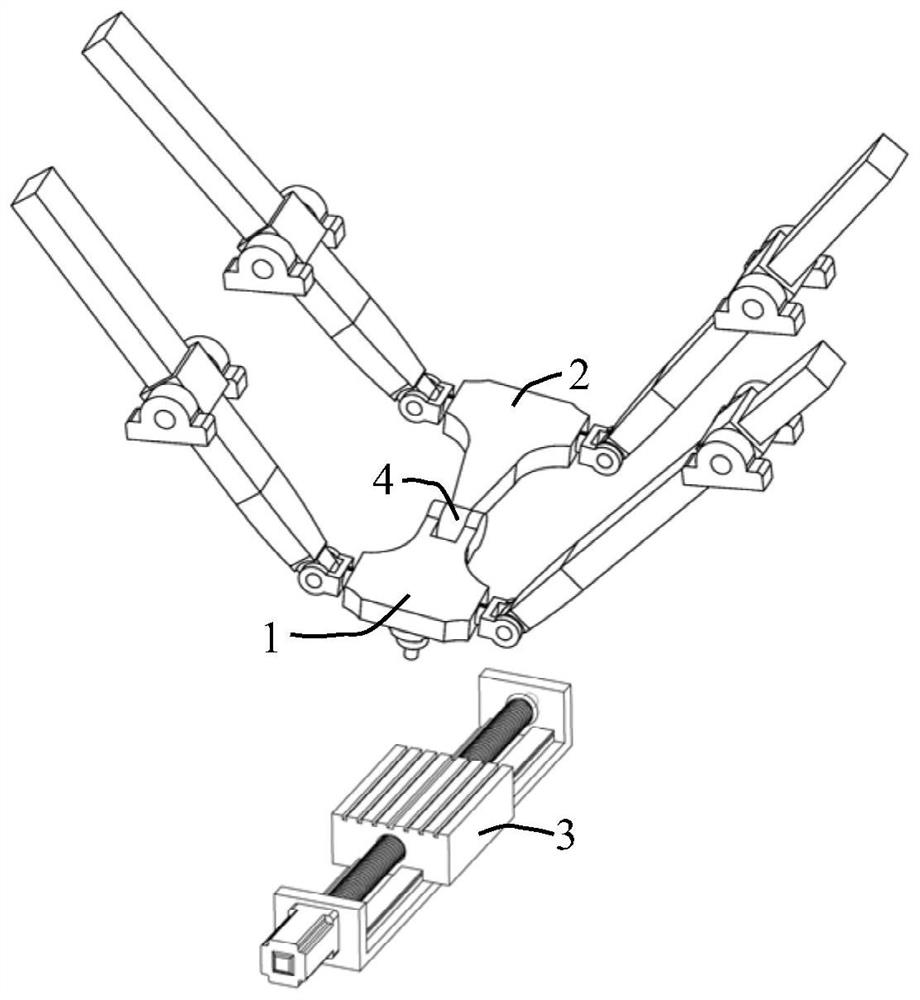
[0025] like figure 1 , shown in 5 and 7, a five-degree-of-freedom robot that can be used for hardware grinding, including a mobile workbench installed on a frame (omitted in the figure); these are similar to existing mechanisms
[0026] The improvement of the present invention is: the robot also includes a combination platform formed by connecting the first end platform 1 and the second end platform 2 with a grinding head and four first branches connected in parallel between the frame and the combination platform . Wherein: two first branches are connected in parallel between the frame and the first end platform, and the other two first branches are connected in parallel between the frame and the second end platform. The first branch includes a frame rotating pair sequentially connected between the frame and the first end platform (or the second end platform), the first moving pair formed by the cooperation of the first slider 13 and the guide rod 14, and the second A Hooke ...
Embodiment 2
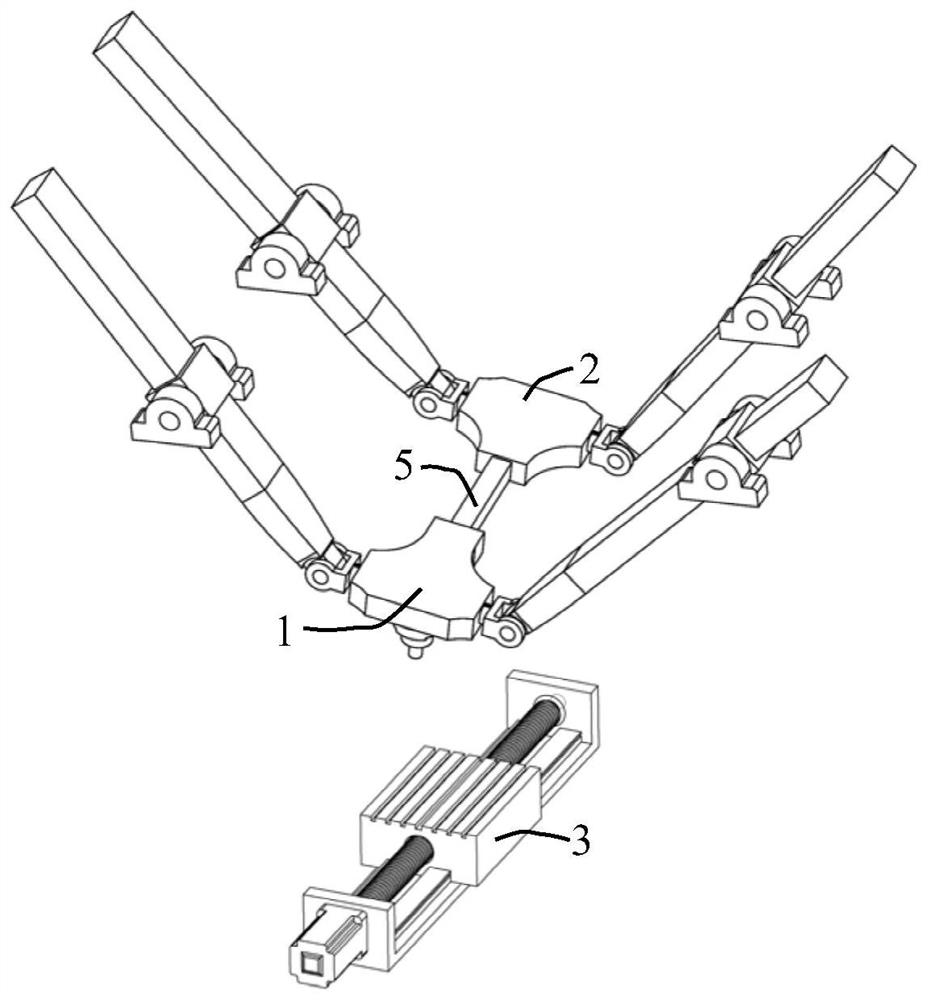
[0031] like figure 2 , The five-degree-of-freedom robot that can be used for hardware grinding shown in 5 and 7 has a structure similar to that of Embodiment 1, the difference is that the first end platform and the second end platform of Embodiment 2 are connected by an end moving pair 5 . The sliding axis of the terminal moving pair is perpendicular to the axis of the second rotation axis of the first Hooke hinge of the first Hooke hinge.
Embodiment 3
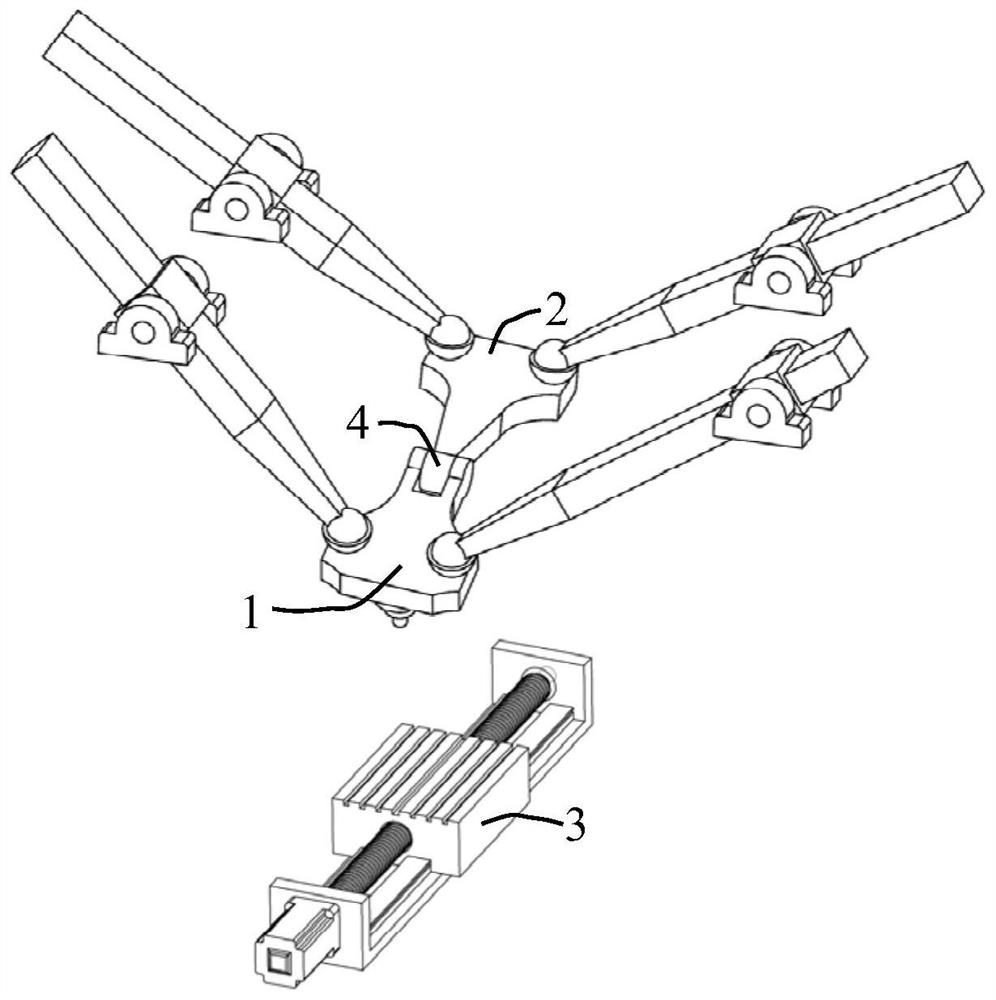
[0033] like image 3 , The five-degree-of-freedom robot that can be used for hardware grinding shown in 6 and 7 is similar in structure to that of Embodiment 1, except that in the first branch of Embodiment 3, the guide rod and the first end platform (or the first end platform) Two end platforms) are connected by ball pair 17. The line connecting the centers of the two ball sub-centers in the two first branches connected to the first end platform is parallel to the line connecting the centers of the two ball sub-centers in the two first branches connected to the second end platform and the end rotation secondary axis.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More