

Unmanned vehicle brake control method, control system and vehicle
An unmanned vehicle and brake control technology, applied in the direction of braking safety system, brakes, vehicle components, etc., can solve problems such as unreasonable brake pressure configuration, avoid brake nodding and rollover accidents, and improve braking reliability. Sex and driving safety, the effect of ensuring posture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
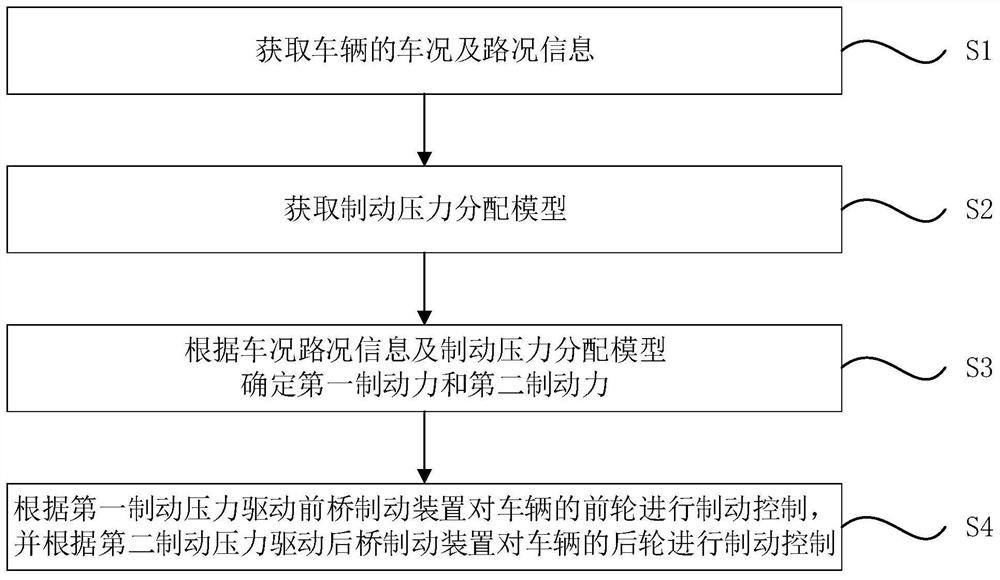
[0038] figure 1 It is a flow chart of a braking control method for an unmanned vehicle provided in Embodiment 1 of the present invention. This embodiment is applicable to the application scenario of performing independent braking control on the front axle and the rear axle of the unmanned vehicle, and the method can be executed by the braking device and the controller of the unmanned vehicle. like figure 1 As shown, the braking control method of the unmanned vehicle specifically includes the following steps:
[0039] Step S1: Obtain vehicle condition and road condition information of the vehicle.
[0040] In this embodiment, the vehicle condition and road condition information includes the vehicle condition information of the vehicle and the road condition information of the vehicle running process, wherein the vehicle condition information refers to the performance and operating parameters of the vehicle, and sensors can be used to collect the vehicle condition information of...
Embodiment 2
[0125] The embodiment of the present invention also provides a braking control system for an unmanned vehicle. Image 6 It is a schematic structural diagram of an unmanned vehicle braking control system provided by Embodiment 2 of the present invention. Figure 7 It is a schematic diagram of the installation structure of an unmanned vehicle braking control system provided by Embodiment 2 of the present invention.
[0126] like Image 6 and Figure 7 As shown, the driverless vehicle brake control system 01 includes: a power supply assembly 10, a vehicle control unit 20, a first brake controller 30, a second brake controller 40, a front axle brake device 50, a rear axle The braking device 60 and the signal acquisition unit 70, wherein the power supply assembly 10 is used to supply power to the vehicle control unit 20, the first brake controller 30 and the second brake controller 40; the signal acquisition unit 70 is used to obtain vehicle conditions and road conditions inform...
Embodiment 3
[0140] Embodiment 3 of the present invention also provides a vehicle. Figure 8 It is a structural schematic diagram of a vehicle provided in Embodiment 3 of the present invention. like Figure 8 As shown, the vehicle 02 includes the braking control system 01 for the unmanned vehicle described above.
[0141] In this embodiment, the vehicle control unit can also perform fault monitoring on various components of the driverless vehicle braking control system 01, and classify the fault levels, and perform alarm, speed limit and parking control on the vehicle according to the fault levels.
[0142] Exemplarily, the vehicle control unit can acquire the vehicle's braking pressure, braking time, temperature, voltage and current of the braking device, and liquid level sensor parameters in real time, and perform fault monitoring on the braking control system 01 of the unmanned vehicle, The setting of specific monitoring data will not be repeated here.
[0143] To sum up, the vehicle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More