

Cycloid tooth profile matching modification method of precision speed reducer for robot
A technology of precision reducer and cycloidal teeth, which is applied in the field of cycloid tooth profile matching and modification of precision reducer for robots, which can solve the problems of increasing the meshing clearance, reducing the torsional stiffness and transmission accuracy of the reducer, and avoiding backlash, Uniform and reasonable modification of the tooth profile to ensure torsional rigidity and transmission accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
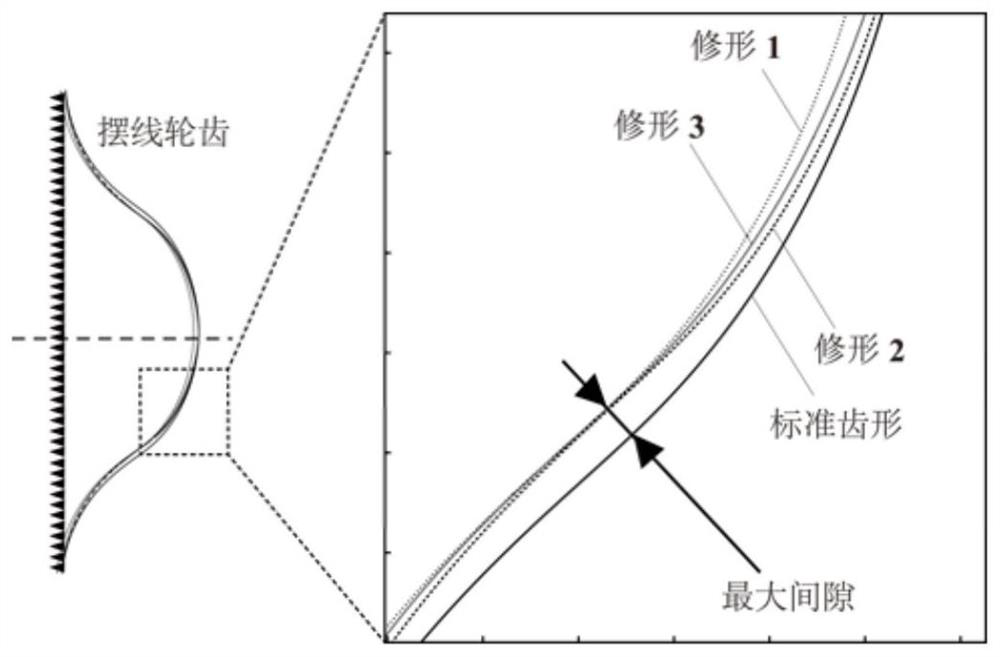
[0039] like Figure 1 to Figure 9 As shown, this method takes a certain type of precision reducer of an industrial robot as an example to illustrate the specific processing process. The number of teeth of the cycloid wheel Z p 40, the number of pin wheel teeth Z c is 39; R p is the radius of the pin tooth distribution circle, the value is 114.5mm; r rp is the radius of the pin tooth, with a value of 5mm; a is the eccentricity of the crankshaft, with a value of 2.2mm; in order to compare with the traditional modification method, two combined modification methods were used to obtain the same maximum modification backlash. The first combination modification method is to f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More