

Efficient high-precision two-finger clamping device with power-loss keeping function
A clamping device and high-precision technology, applied in the field of servo mechanisms, can solve the problems of low precision of the clamping device, small holding force, complex structure, etc., and achieve the effect of meeting the requirements of the maximum clamping force, low self-weight, and high transmission accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
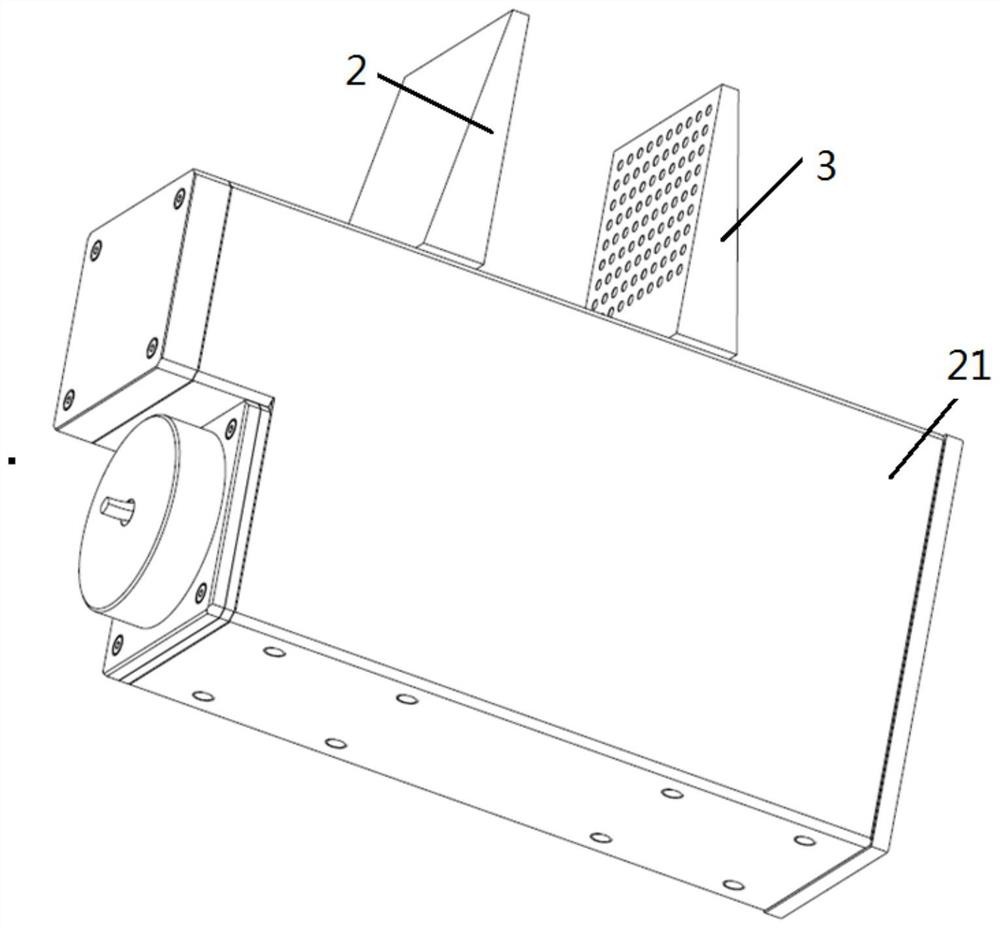
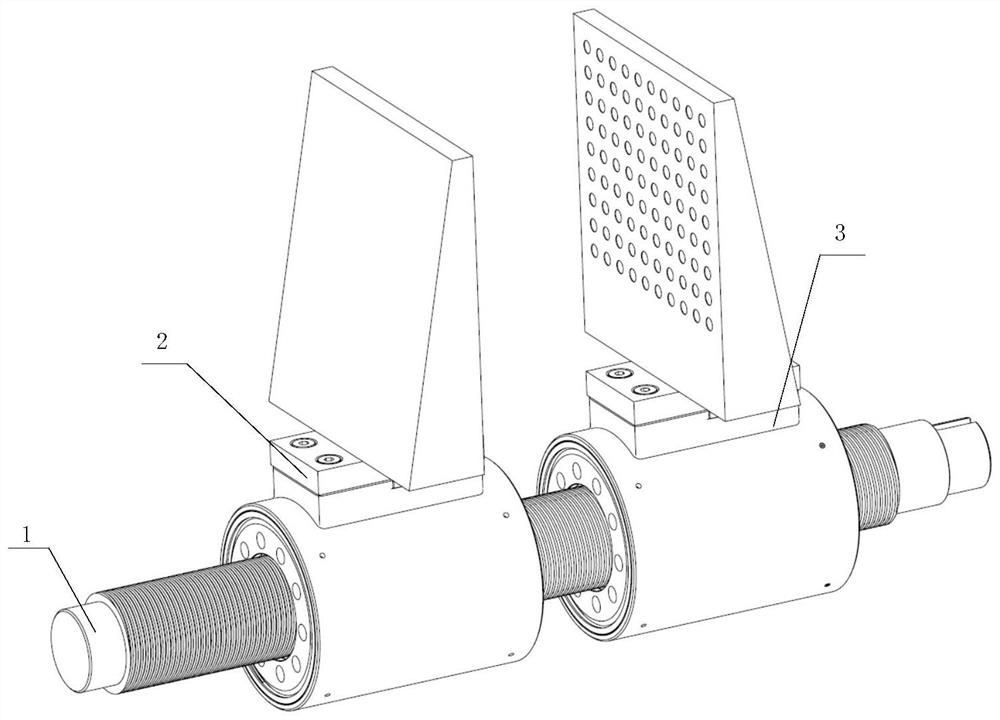
[0041] figure 1 An external schematic diagram of the device is given. In a preferred embodiment, the device includes three parts: a compound planetary roller screw drive system, a power transmission system and a housing assembly.
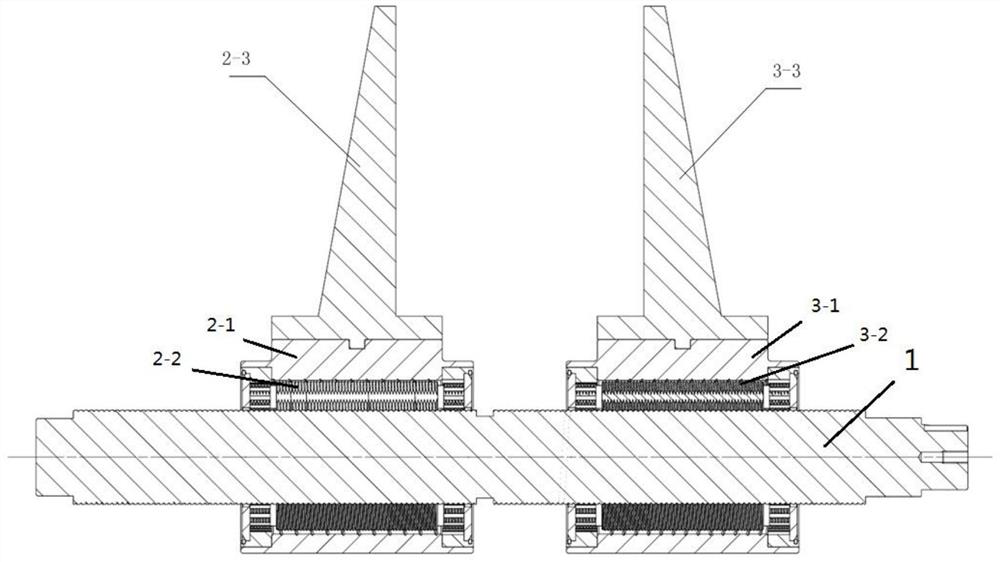
[0042] The compound planetary roller screw transmission system is provided with a screw 1, a left-handed nut assembly 2 and a right-handed nut assembly 3, and the screw 1 converts the rotational motion of the power transmission system into a Relative linear motion in the left clamping direction of rod 1;
[0043] A motor assembly is set in the power transmission system, and the motor transmission assembly provides power for all levels of transmission of the servo mechanism;
[0044] A sensor component is set in the power transmission system, which provides accurate motor position information for servo con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More