

Flexible spine mechanism and kangaroo-like hopping robot
A spine and flexible technology, applied in the field of bionic robots, can solve the problems of insufficient flexibility of the trunk, complex structure, and invariable stiffness of the spine, and achieve the effect of increasing controllability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
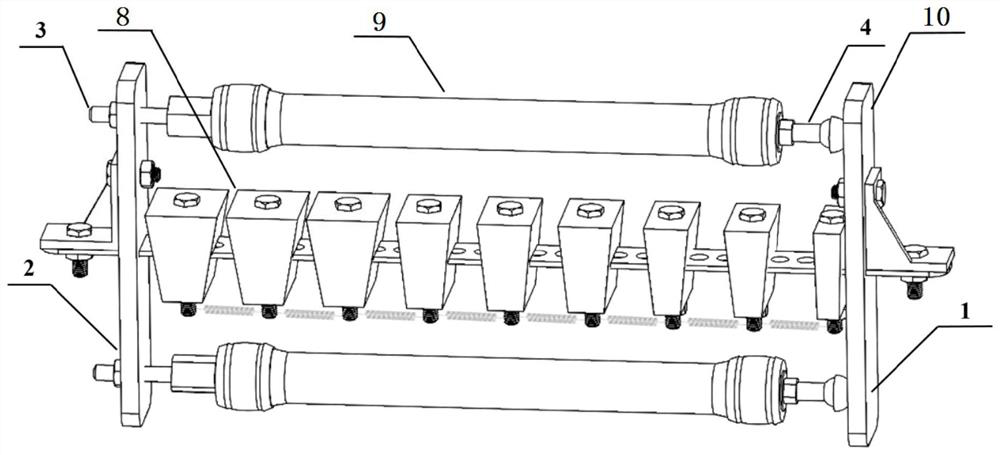
[0031]A flexible spine mechanism of a kangaroo-like jumping robot with variable stiffness, comprising a bionic spine 8, a pneumatic bionic muscle 9 and a supporting baffle 10, wherein:
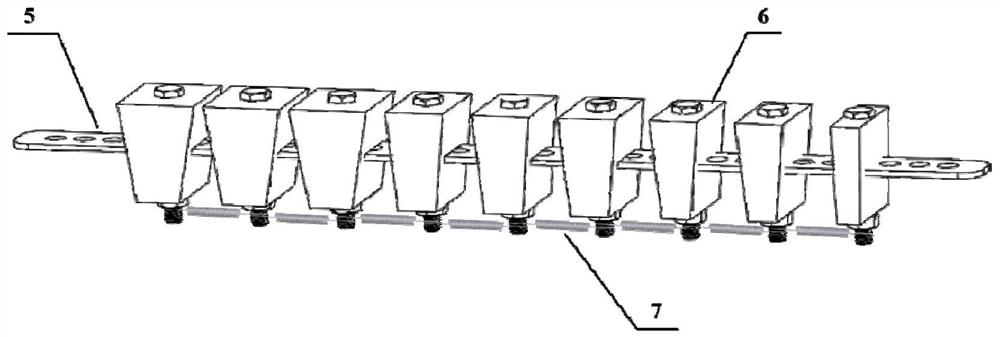
[0032]The bionic spine 8 includes a long elastic plate 5 and several bionic vertebrae 6 with the same structure but different sizes. The long elastic plate 5 is designed with many closely arranged through holes for fixing the bionic vertebrae. Vertebrae 6 and supporting baffle 10. By arranging a number of through holes on the elastic plate 5, different basic rigidities of the bionic spine 8 can be realized by changing the gap between the bionic vertebrae 6 and the number of the bionic vertebrae 6 on the elongated elastic plate 5.
[0033]The bionic vertebrae 6 are made of rigid wooden blocks with a trapezoidal longitudinal section and a rectangular cross section, which are connected in series to the elongated elastic plate 5 from large to small, and are fixed by bolts passing through through holes. Throug...
Embodiment 2
[0040]Such asfigure 1 As shown, a flexible spine mechanism of a kangaroo-like jumping robot with variable stiffness is composed of a bionic spine 8, a pneumatic bionic muscle 9 and a supporting baffle 10. The supporting baffle 10 includes a front supporting baffle 1 and a back Support baffle 2. The two ends of the bionic spine 8 pass through the center of the front support baffle 1 and the rear support baffle 2 respectively, and are fixed by a triangular bracket; there are two pneumatic bionic muscles 9 which are respectively installed on the bionic The upper and lower sides of the longitudinal direction of the spine 8; the air intake end 3 of the pneumatic bionic muscle 9 is fixed to the rear support baffle 2 through a threaded rod, and the air blocking end 4 is fixed to the front support baffle 1 through a universal joint.
[0041]Such asfigure 2As shown, the bionic spine 8 includes a long elastic metal sheet and several bionic vertebrae 6 with the same structure but different sizes....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More