

Overhead line robot obstacle recognition method
A technology for obstacle identification and overhead lines, which is applied in the field of electrical equipment, can solve the problems of consuming large processor operating memory and calculation amount, affecting the rapid update of convolutional neural network models, and affecting the efficiency of overhead line robots for obstacle recognition.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
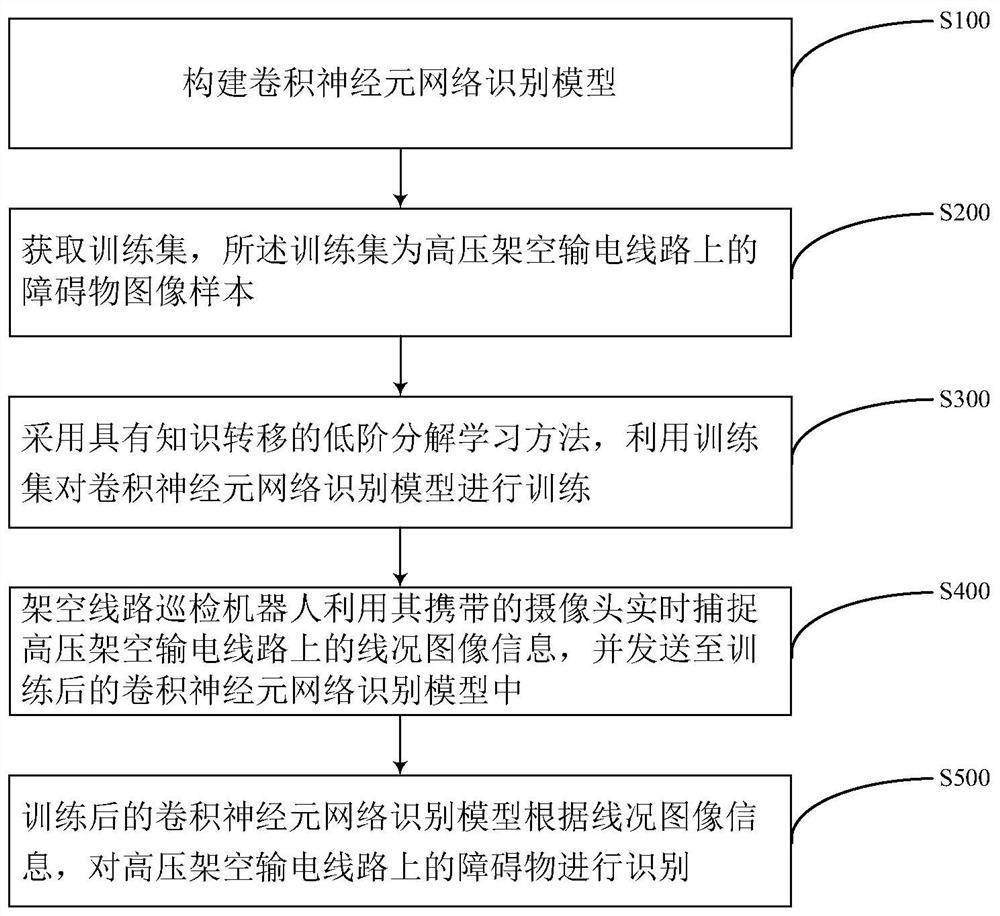
[0039]The present application provides an obstacle recognition method for an overhead line robot, which is used for an overhead line robot to recognize an obstacle on a high-voltage overhead transmission line.figure 1This is a flowchart of the method for identifying obstacles for overhead line robots in this application. The method for identifying obstacles for overhead line robots includes:
[0040]Step S100, construct a convolutional neural network recognition model.
[0041]Step S200: Obtain a training set, which is an obstacle image sample on a high-voltage overhead transmission line.
[0042]In this application, the process of obtaining an obstacle image sample is: the obstacle recognition positioning camera on the overhead line robot obtains the obstacle image sample. The obstacles of high-voltage overhead transmission lines include anti-vibration hammers, tensile clamps, insulators, and suspension clamps.
[0043]In step S300, a low-level decomposition learning method with knowledge tran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More