

Double-arm robot cooperative vibration reduction method for grinding large thin-walled workpiece
A large-scale thin-walled part and robot technology, which is applied to machine tools suitable for grinding workpiece planes, grinding workpiece supports, grinding machine parts, etc., can solve the problems of reducing grinding thin-walled parts and large vibration amplitude.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings.
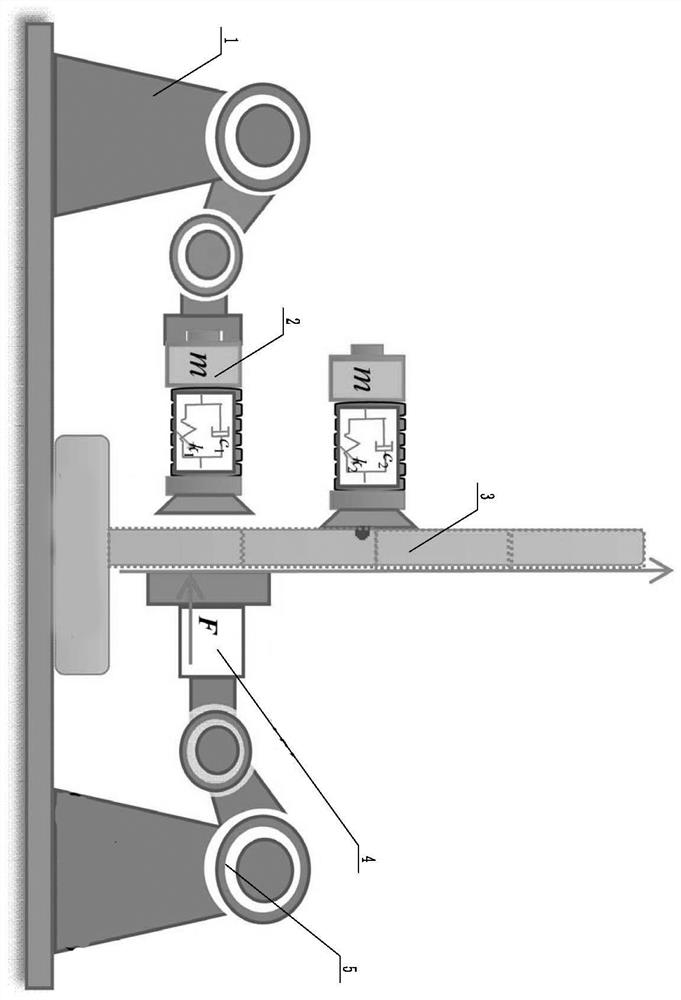
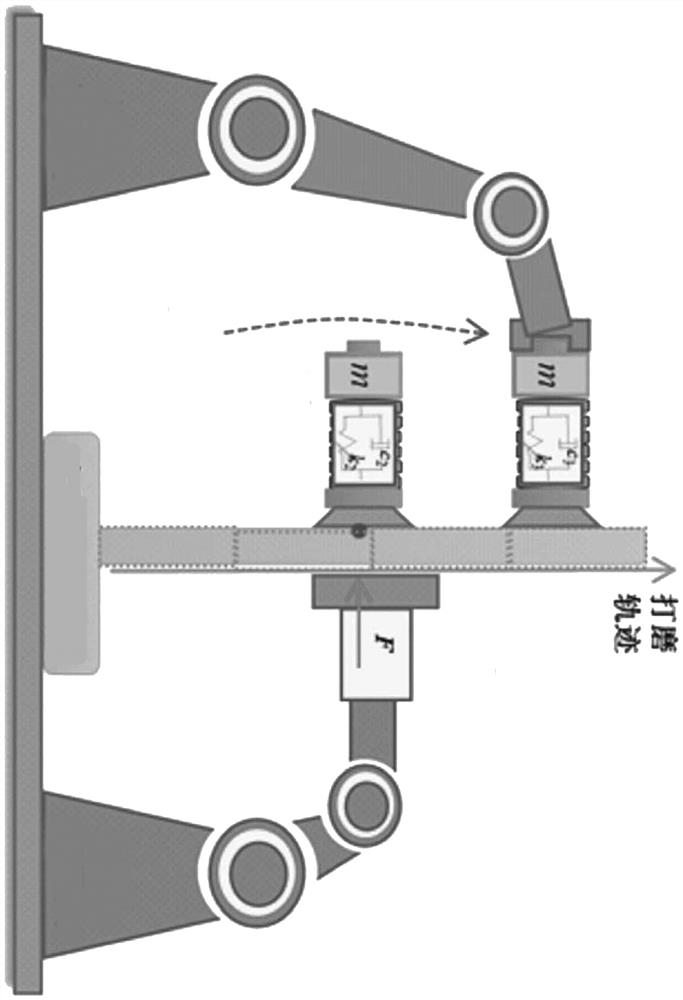
[0035] Such as Figure 1-8 Shown is a dual-arm robot cooperative vibration reduction method for grinding large thin-walled parts. The grinding and vibration reduction device used for vibration reduction includes a handling robot 1 and a grinding robot 5. The handling end of the handling robot 1 is connected with a vibration-absorbing 2, the grinding end of the grinding robot 5 is connected with a powerful control end effector 4, and the force control end effector 4 grinds one end of the thin-walled part 3 in the left-right direction, and the vibration absorber 2 acts on the other end of the thin-walled part 3 in the left-right direction. one end, including the following steps,
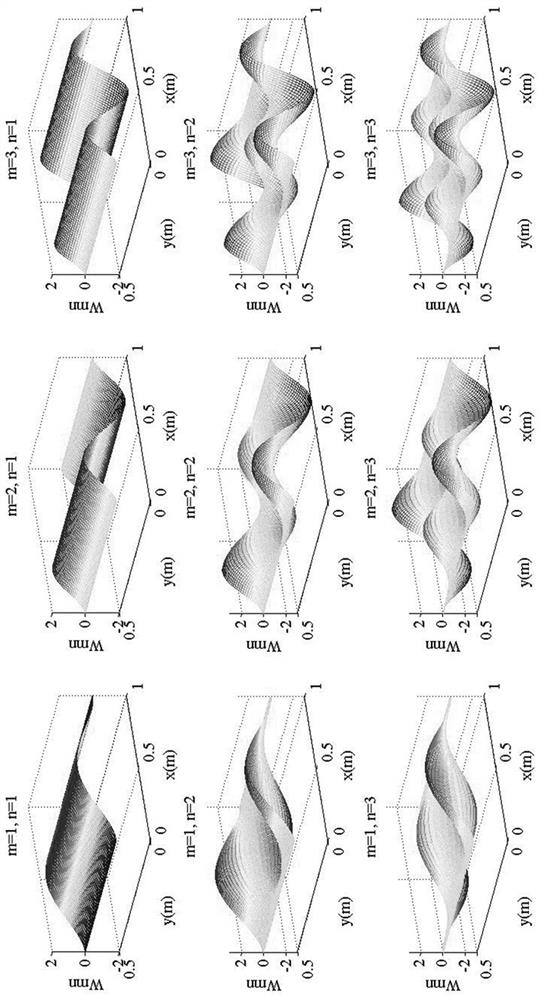
[0036] (1) Analyze and establish the steady-state response model of the forced vibration of the thin-walled part 3;
[0037] (2) Carry out a modal test on the thin-walled part 3 with two side...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More