

A Metamorphic Series-Parallel Manipulator Structure for Space Manipulation
A technology of manipulators and mechanical fingers, which is applied in the field of spatial manipulation metamorphic series-parallel manipulator structures, can solve the problems of low rigidity, insufficient flexibility, and difficult operation, and achieve the effect of good overall rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
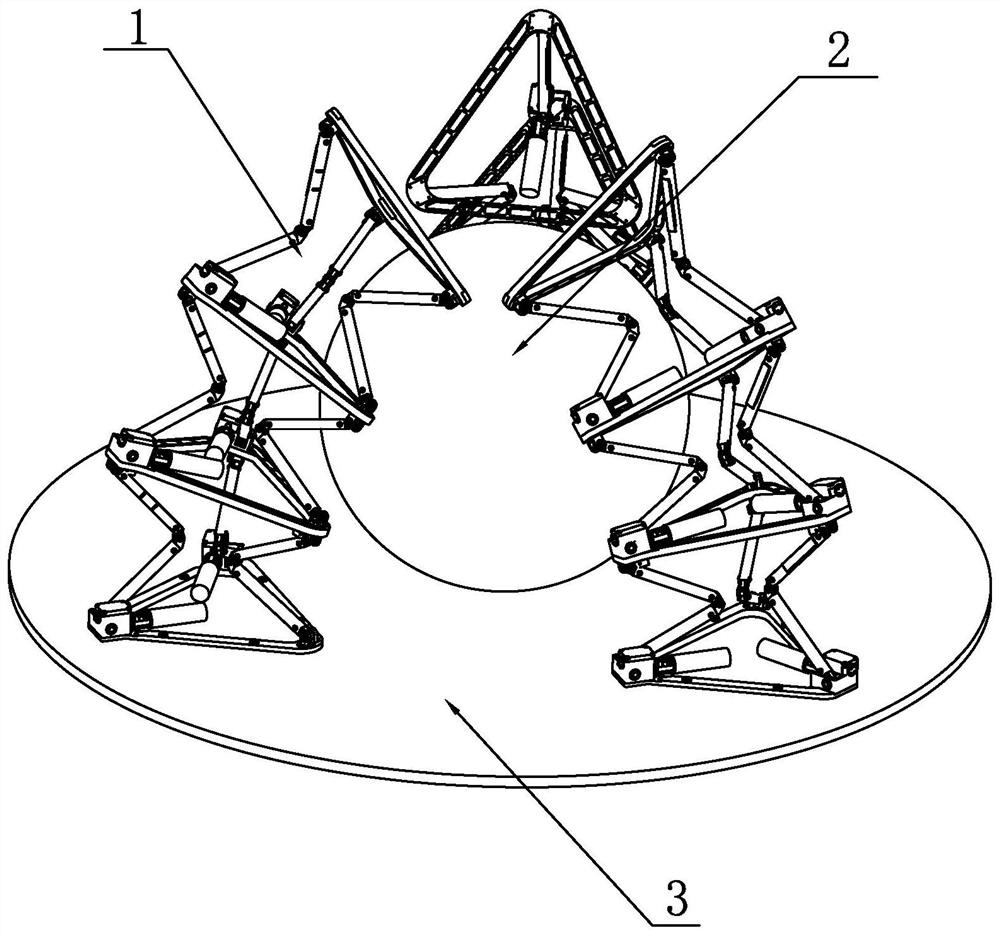
[0029] Specific implementation mode one: refer to figure 1 Describe this embodiment in detail, a kind of spatial manipulation variant series-parallel manipulator structure described in this embodiment, including: at least two series-parallel manipulator assembly 1 and manipulator base 3;
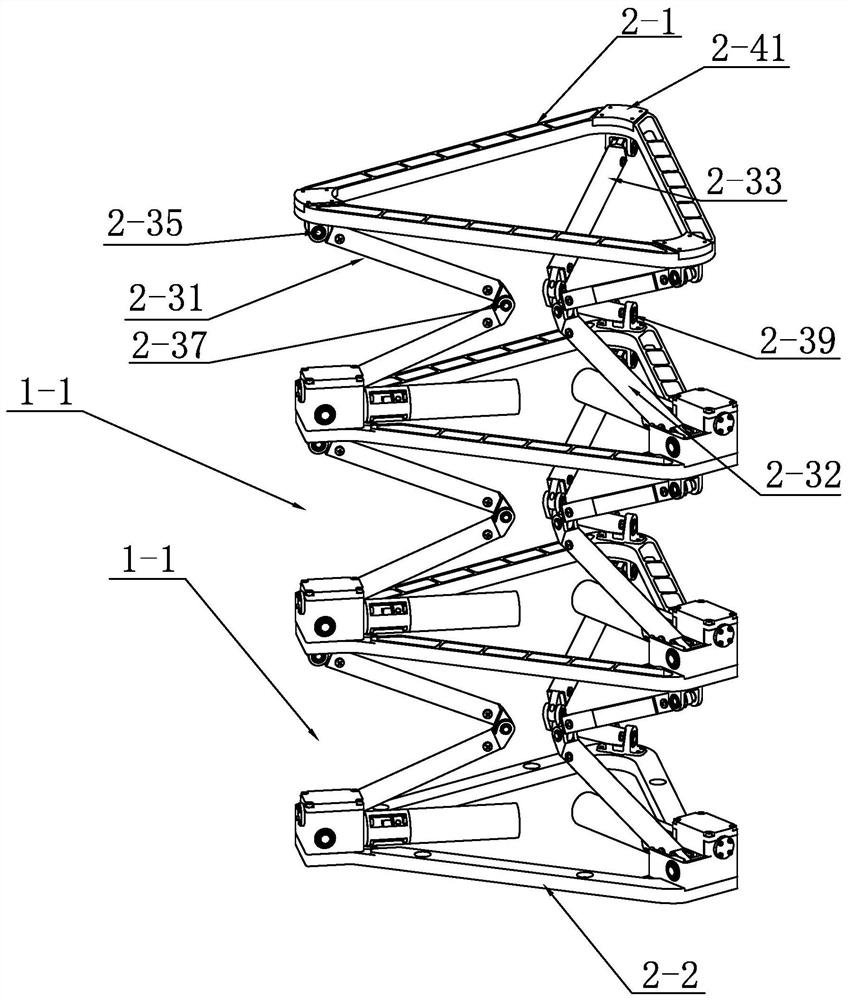
[0030] The series-parallel manipulator assembly 1 includes at least one parallel manipulator structural unit assembly 1-1, and the parallel manipulator structural unit assembly 1-1 includes a moving platform 2-1 and a static platform 2-2, and the moving platform 2-1 It is connected with the static platform 2-2 through two dynamic connection components and one static connection component,
[0031] The dynamic connection assembly includes a first square hollow connecting rod 2-31 and a second square hollow connecting rod 2-32, and one end of the first square hollow connecting rod 2-31 connects with the first ball pair 2-35. The moving platform 2-1 is connected, and one end of the second squar...
specific Embodiment approach 2
[0043] Embodiment 2: This embodiment is a further description of Embodiment 1. The difference between this embodiment and Embodiment 1 is that the metamorphic component 2-33 includes a tooth seat 3-1 and a return spring 3-2 , the guide cylinder 3-3, the coupling 3-4, the lock block 3-5, the artificial muscle 3-6, the sliding claw sleeve 3-7 and the rotating shaft 3-8, one end of the rotating shaft 3-8 is arranged on the guide On the inner side of the cylinder 3-3, a sliding claw sleeve 3-7 is provided on the end of the rotating shaft 3-8 placed on the inner side of the guide cylinder 3-3. The artificial muscles 3-6 are fixedly connected, the guide cylinder 3-3 is also provided with a helical tooth seat 3-1 matched with the sliding claw sleeve 3-7, the helical tooth seat 3-1 and the sliding claw sleeve 3-7 There is a return spring 3-2 therebetween, and one end of the rotating shaft 3-8 placed outside the guide cylinder 3-3 is movably connected to the lock block 3-5 through a co...
specific Embodiment approach 3
[0044] Embodiment 3: This embodiment is a further description of Embodiment 1. The difference between this embodiment and Embodiment 1 is that the first ball pair 2-35 includes a Hooke hinge and a sub-rotating pair. The hinge includes a T-shaped shaft 5 and a fork seat 6, and the Hooke hinge is connected to the moving platform 2-1 through a sub-rotation pair.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More