Method for collecting and applying process parameters of industrial robot
An industrial robot and process parameter technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as inability to collect process data, poor process intelligence, and optimize process knowledge bases, to solve problems such as low production programming efficiency, The effect of lowering the technical threshold and improving the processing quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
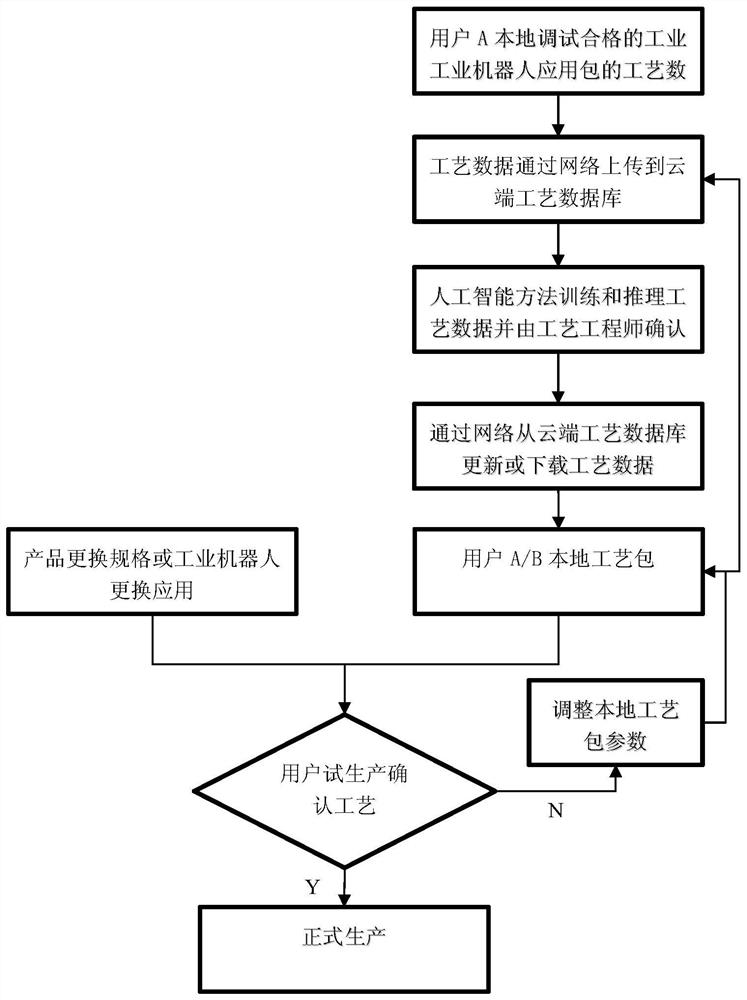
[0019] Refer to attached figure 1 , the steps implemented in this embodiment are:
[0020] step 1:
[0021] Define a process package template on the local controller of the industrial robot. The process package contains the speed information of the end effector of the industrial robot, the attribute information of the workpiece and the complete process data that has been debugged and qualified by experienced craftsmen. The process package can be a welding process package, gluing process package, cutting process package, grinding process package, assembly process package, deburring process package, etc., the type of process package can be added later according to different job types;
[0022] Step 2:
[0023] The above process software package data can be uploaded to the cloud process database through the network. The process database stores process data from different industrial robot applications. The same industrial robot application has process data from different industr...
Embodiment 2
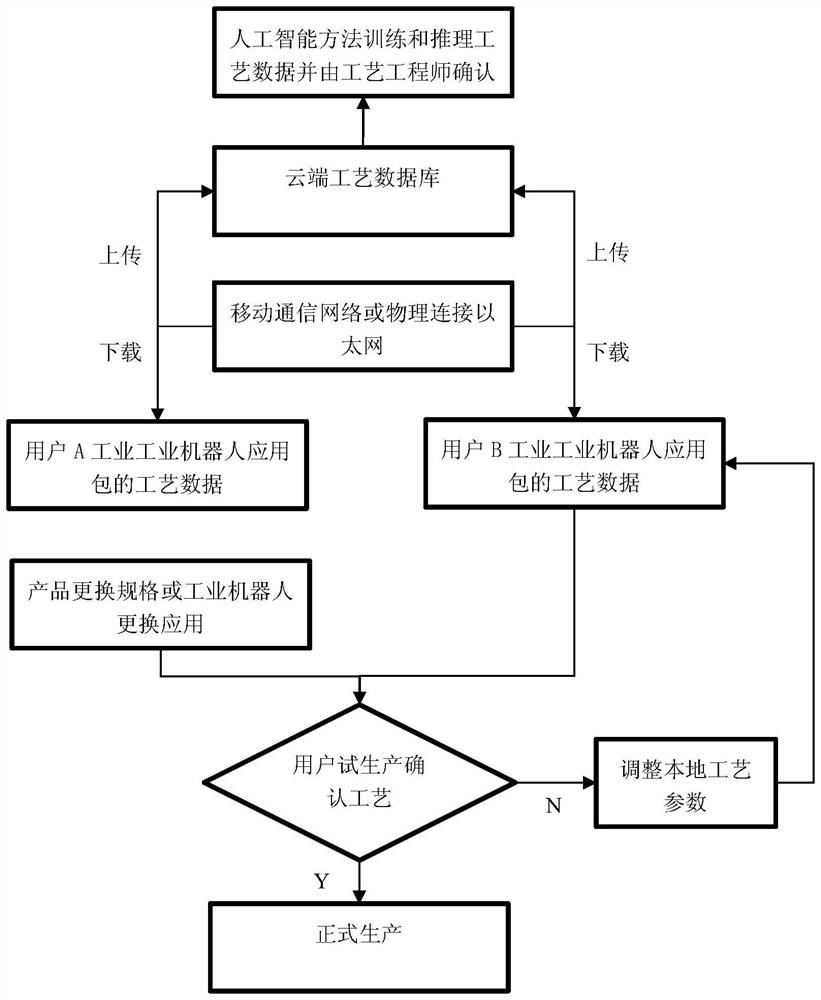
[0031] Refer to attached figure 2 , the steps implemented in this embodiment are:
[0032] step 1:
[0033] Define a process package template on the local controller of the industrial robot. The industrial robot has built-in some process package types and data before leaving the factory. Users can create process packages or add process data in actual use;
[0034] Step 2:
[0035] The process package defined in step 1 usually includes the speed information of the end effector of the industrial robot, the attribute information of the workpiece, and the complete process data qualified for debugging. The process package types can be welding process package, gluing process package, cutting process package, and grinding process package. , assembly process package, deburring process package, etc., the type of process package can be added later according to different job types;
[0036] Step 3:
[0037] The process package data described in step 1 is uploaded to the cloud proces...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com