

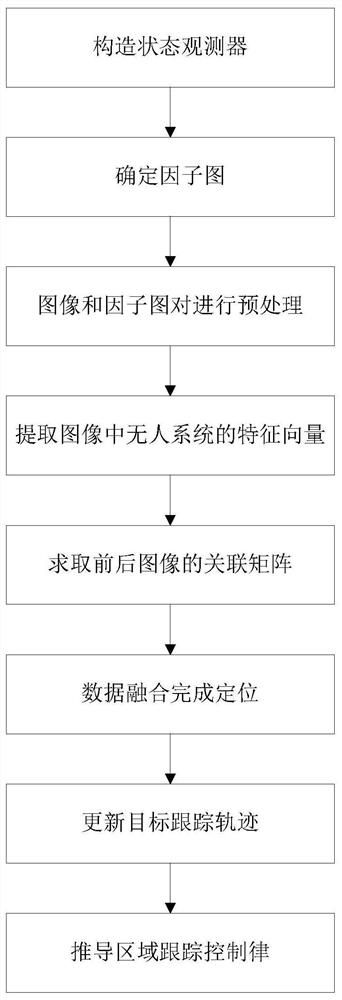
Fusion positioning tracking control method based on multi-source image adaptive weight selection
A technology of tracking control and fusion positioning, which is applied in three-dimensional position/channel control, vehicle position/route/altitude control, attitude control, etc., and can solve problems such as signal attenuation and the influence of positioning and tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0261] In order to verify the patented method of the present invention, a comparative simulation verification experiment is designed:
[0262] Under the same area tracking control, the conventional high-gain observer and state observer are used for comparative simulation verification;
[0263] Under the same state observer, the traditional inversion control method is used for comparative simulation verification.
[0264] During the verification process of the simulation experiment, the initial state and external disturbance of the unmanned system are all the same. ,
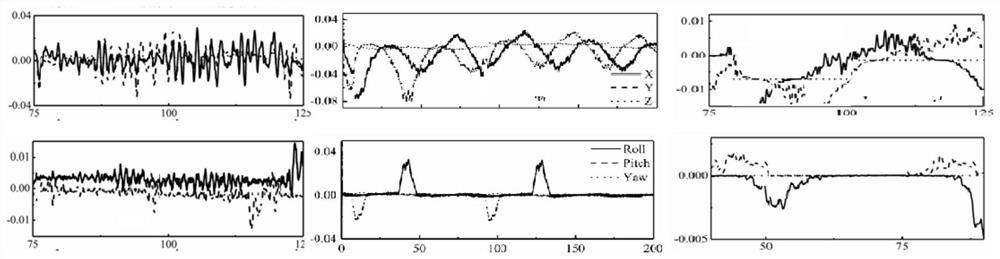
[0265] The comparison results obtained by using the Matlab / Simulink simulation platform are as follows: figure 2 shown. The first column is position information, the second column is attitude information, and the third column is control rate information.
[0266] From the speed estimation results, both the state observer and the high-gain observer in the patent of the present invention can obtain better spee...
Embodiment 2
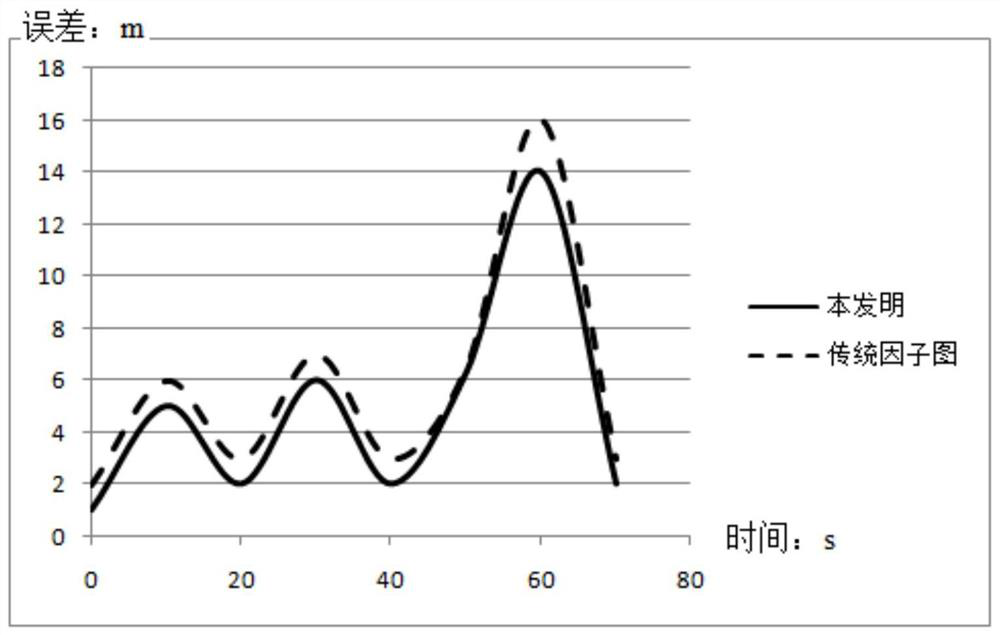
[0268] The present invention uses the KITTI data set for experimental verification.
[0269] The experiment uses the KITTI data set collected under the real road conditions of the unmanned vehicle to conduct the experiment, selects two sections of the path, and sets the satellite signal loss of three time periods in a total of 80 seconds, from the 10th to the 15th second. The 5-second interval, the 10-second interval from the 25th second to the 35th second, and the 20-second interval from the 45th second to the 65th second, each with a 10-second interval in between to observe the recovery of the error when the satellite signal can be received normally. The statistical results of the error comparing this method with the traditional method are shown in Table 1:
[0270] Table 1
[0271] Experimental results The method of this paper Traditional factor graph Average value / m 3.94 4.49 max / m 14.84 17.04 RMSE / m 4.59 5.02
[0272] It can be see...
Embodiment 3
[0274] Embodiments of the present invention are given in conjunction with specific numerical values:
[0275] Dataset Preparation Phase
[0276] In order to make the data set closer to the real environment, and to better test and compare and analyze the present invention, an infrared-visible light tracking data set is constructed from a large number of original UAV video data sets.
[0277] 22 pairs of video segments suitable for multi-target tracking were carefully selected from the original dataset, and a total of 22 pairs of image sequences were generated after a series of image preprocessing such as cropping and registration. The dataset covers a wide range of working environments, such as foggy days, frequent illumination changes, far small targets, and multi-scale environments. It can well train the tracking network and test the generalization ability and performance of the network. The data sets are the environment of far and small objects near the sky; the multi-scale...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More