

Transformer robotic fish obstacle avoidance system and method based on generalized cross-correlation
A generalized cross-correlation, robotic fish technology, applied in the field of transformers, can solve the problems of difficult to find, detect and locate internal faults, and achieve the effect of easy real-time calculation, low calculation amount, and low memory usage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
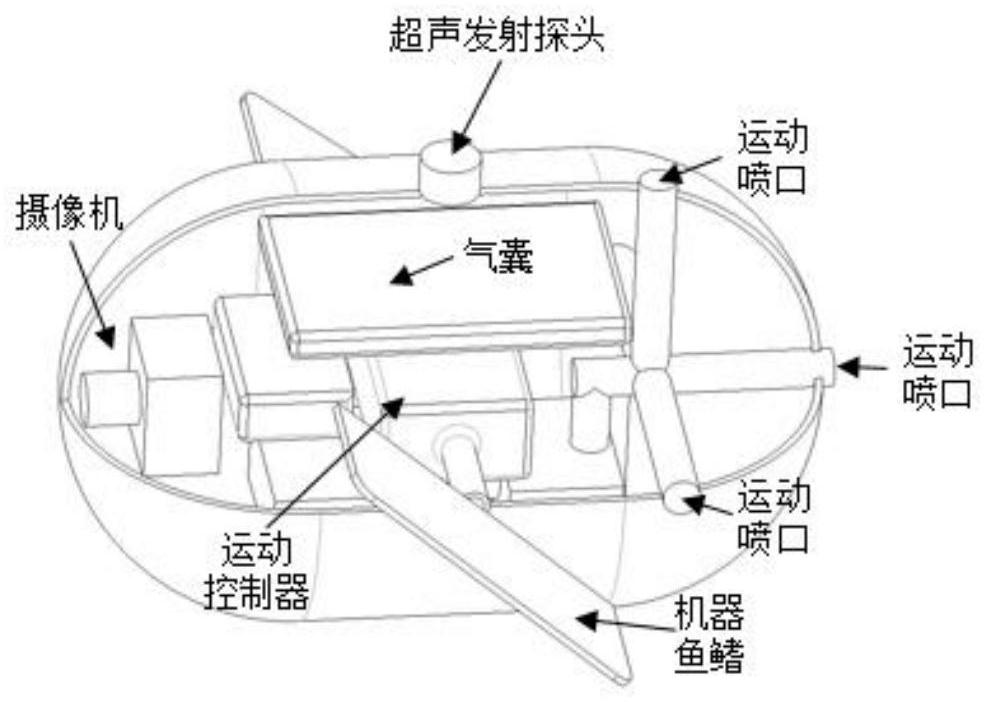
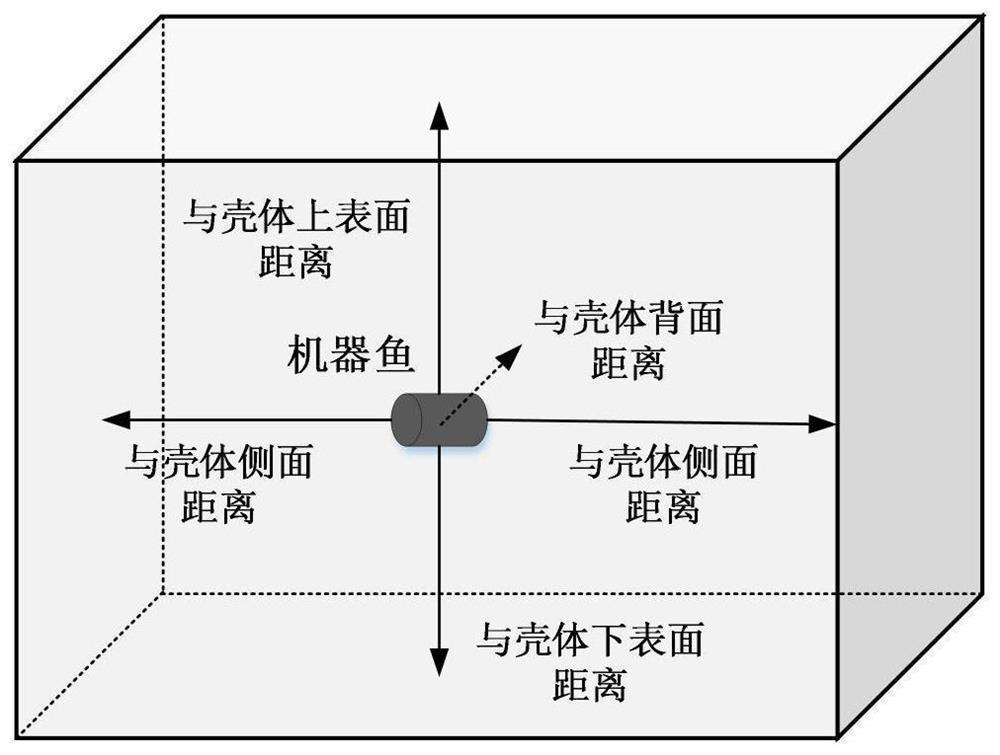
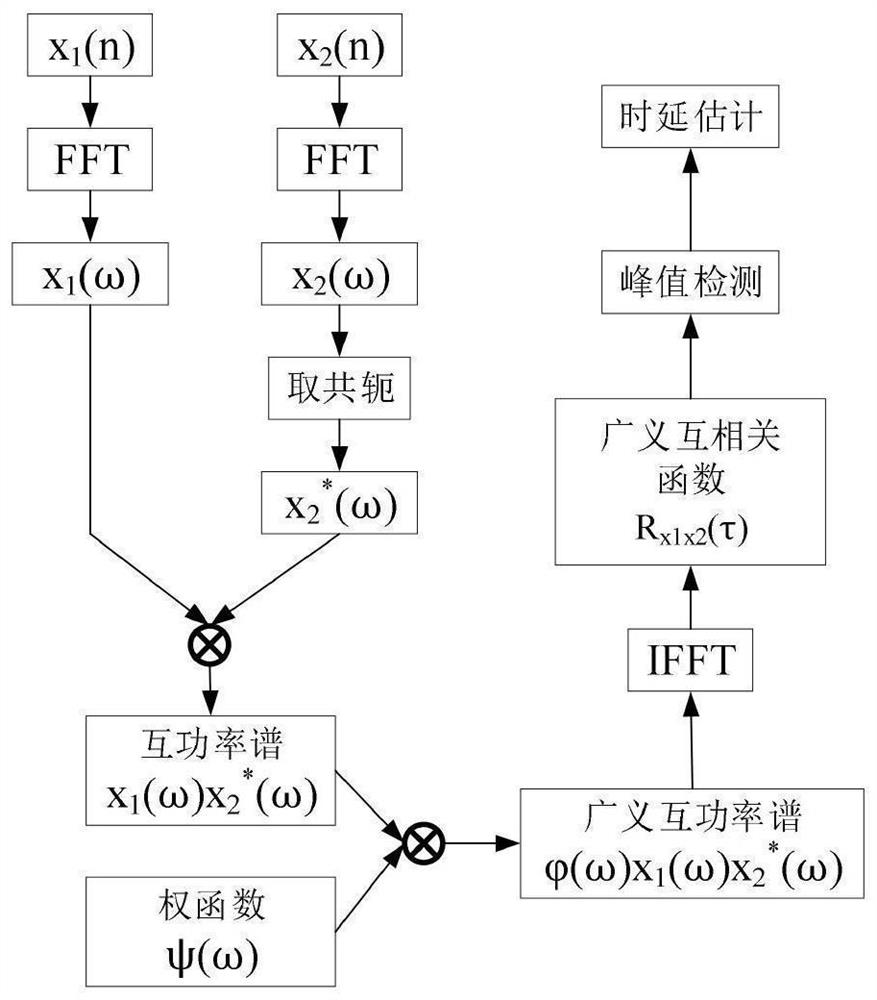
[0045] A transformer robot fish obstacle avoidance system based on generalized cross-correlation, such as figure 1 As shown, the robotic fish includes an ultrasonic transmitting unit, an ultrasonic receiving unit, an ultrasonic propagation delay estimation unit, a distance calculation unit and a motion unit (motion controller). The ultrasonic transmitting unit adopts a directional ultrasonic probe, which can transmit ultrasonic signals to six directions: front, rear, left, right, up and down of the robotic fish; the ultrasonic receiving unit can receive front, rear, left, The echo signals are reflected in 6 directions of right, up and down; the ultrasonic propagation delay estimation unit is connected with the ultrasonic transmitting unit and the ultrasonic receiving unit, and can calculate the time between the ultrasonic transmitting signal an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More