

Robot vision positioning method based on feature point detection and mismatching screening
A technology of feature point detection and robot vision, which is applied in the directions of instruments, image analysis, image enhancement, etc., can solve problems affecting the calculation speed of algorithms, achieve the effects of improving detection speed, facilitating pose calculation, and ensuring matching accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] In order to make the purpose, technical solutions and advantages of the present invention clearer, the technical solutions of the present invention are clearly and completely described below in conjunction with specific embodiments and with reference to the accompanying drawings. Obviously, the described embodiments are part of the implementation of the present invention. example, not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
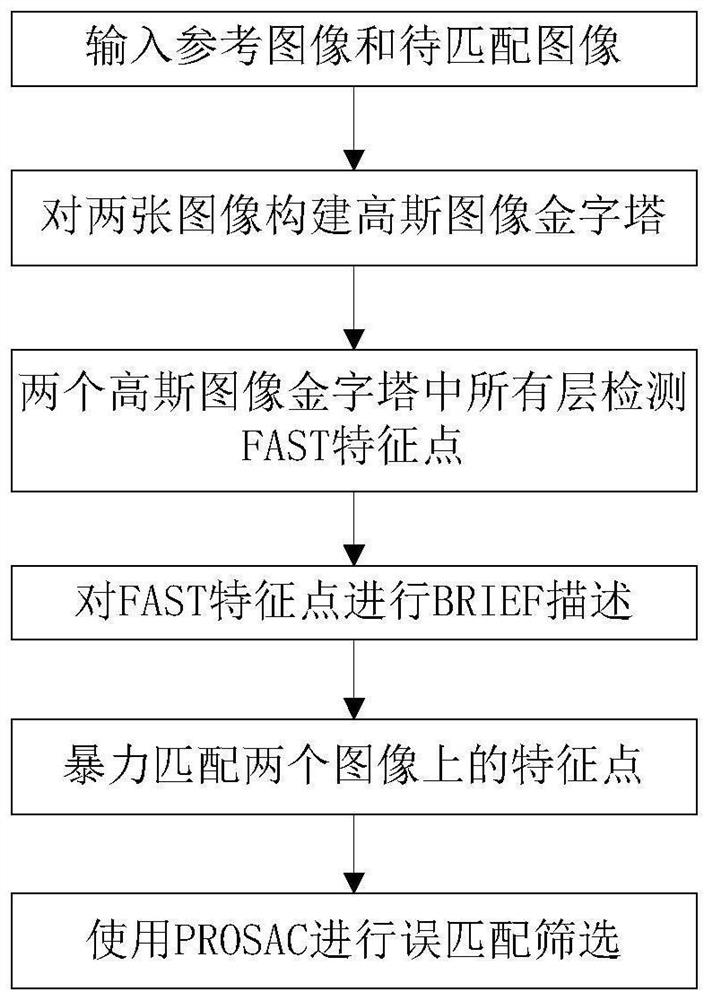
[0073] Such as figure 1 As shown, this embodiment provides a robot vision positioning method based on feature point detection and mismatch screening, including the following steps:
[0074] Step A: Construct a Gaussian image pyramid for the reference image and the image to be matched respectively;
[0075] The method of constructing a Gaussian pyramid is as follows: us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More