

Oil field inspection unmanned aerial vehicle scheduling method and system and computer medium
A scheduling method and technology of unmanned aerial vehicles, applied in the directions of calculation, inspection time patrol, instruments, etc., can solve the problems of inability to conduct monitoring and scheduling on a large scale, limited processing capacity of unmanned aerial vehicles for oilfield inspection, and low work efficiency. Improve the accuracy of inspection, save time and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
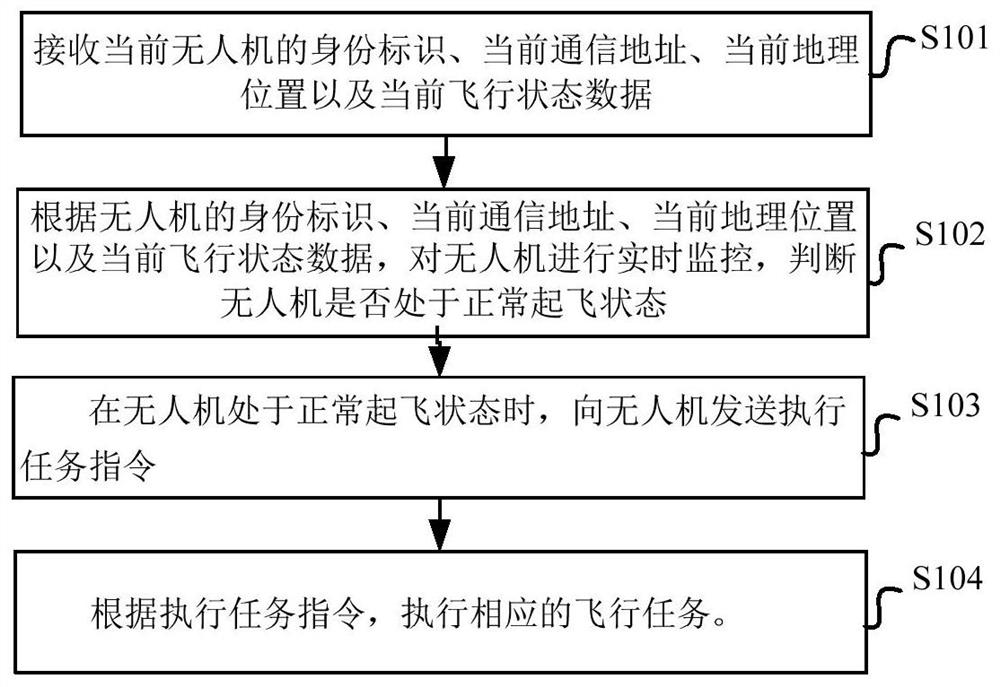
[0047] figure 1 A schematic diagram of the steps of the scheduling method for the oil field inspection UAV according to the embodiment of the present application is shown in .
[0048] like figure 1 As shown, the scheduling method of the oil field inspection UAV in the embodiment of the present application specifically includes the following steps:
[0049]S101: Receive the current drone's identity, current communication address, current geographic location and current flight status data.
[0050] First, the oilfield inspection UAV sends its own identity ID (ID entity), current communication address IP, current geographic location (longitude, latitude, altitude) and flight status data to the server.
[0051] The corresponding oil field inspection UAV includes a flight control module, a communication module and a GPS positioning module. The identity ID is stored in the flight control module, and the current communication IP address is stored in the communication module. The...
other Embodiment approach
[0064] In other embodiments, the real-time monitoring of the UAV also includes:
[0065] Real-time monitoring of the current geographic location of the UAV. When the current geographic location of the UAV is in the early warning geographic location, such as some sensitive areas where flying is prohibited, an early warning message is sent to the UAV.
[0066] Realized flight restrictions on certain sensitive areas, the server can establish a sensitive area database, and trigger an alarm when the route of the oil field inspection drone passes or the oil field inspection drone approaches these areas. At this time, the algorithm of point-to-point distance and point-to-line distance in geometric mathematics is used, and according to the constants such as the radius of the earth, the distance value in meters can be converted.
[0067] Further, to judge whether the UAV is in a normal take-off state, the judgment process is as follows:
[0068] S1: Pre-set the task data table, which ...
Embodiment 2
[0120] This embodiment provides a scheduling system for oilfield inspection drones. For details not disclosed in the oilfield inspection drone scheduling system in this embodiment, please refer to the scheduling method for oilfield inspection drones in other embodiments specific implementation content.
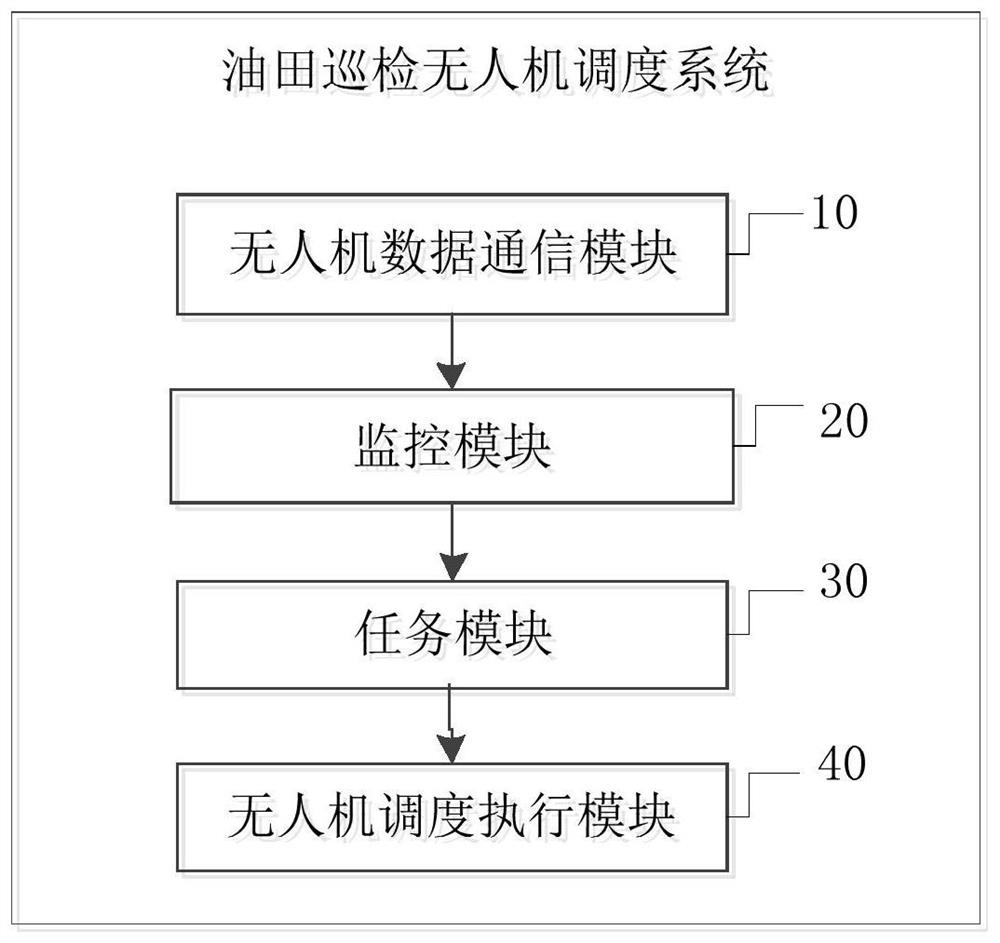
[0121] figure 2 A schematic structural diagram of an oilfield inspection UAV scheduling system according to an embodiment of the present application is shown in .
[0122] like figure 2 As shown, the UAV scheduling system for oil field inspection in the embodiment of the present application specifically includes a UAV data communication module 10 , a monitoring module 20 , a task module 30 and a UAV scheduling execution module 40 .
[0123] UAV data communication module 10: for receiving the UAV's identity, current communication address, current geographic location and current flight status data.
[0124] First, the oilfield inspection UAV sends its own identity ID (ID en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More