

A cluster-oriented miniature desktop robot
A robot and miniature technology, applied in the field of robotics, can solve the problems of staying, the validity of cluster self-organizing motion control algorithms, and the inability to verify the transferability, and achieve the effects of stable work, good engineering application value, and strong flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
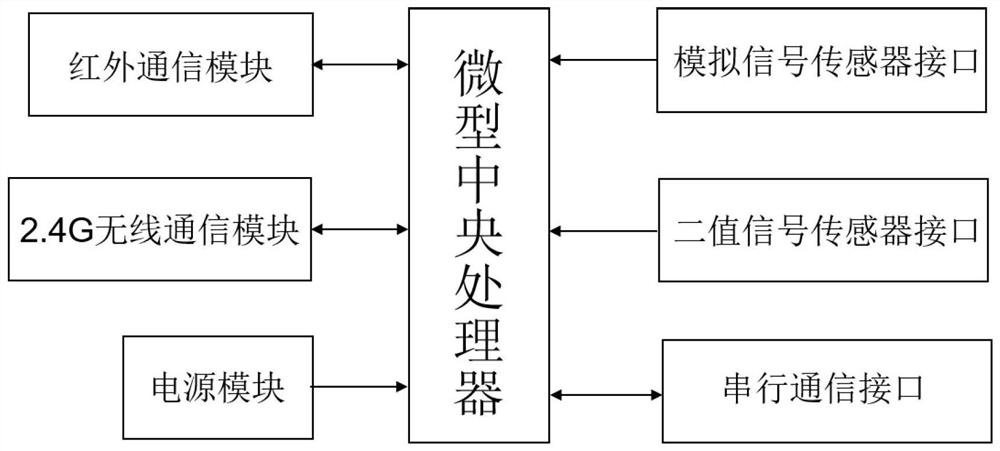
[0028] like figure 1 As shown, the perception decision-making layer includes a micro central processing unit. The micro central processing unit is an embedded central processing unit with a 32-bit ARM architecture based on the cortex-M3 core. Perform environmental perception and motion decision-making, and the background system receives information from the host computer in an interrupted manner. The infrared communication module includes a total of 6 groups of infrared transmitter-receiver tubes and their signal processing circuits. The 6 groups of infrared transmitter-receiver tubes are evenly distributed around the perception decision-making layer to achieve 360-degree infrared communication without blind spots. The 2.4g wireless communication module adopts the SMD NRF24L01. The SMD chip helps to efficiently use space to accommodate more sensor devices. The 2.4g wireless communication module communicates with the miniature CPU chip through the SPI interface. The module rec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More