

High-precision drilling device for industrial robot arm joint machining
A technology of industrial robots and drilling devices, applied in the direction of boring/drilling, metal processing equipment, drilling/drilling equipment, etc., to achieve the effects of preventing holes from rusting, improving efficiency, and facilitating automatic switching of working states
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
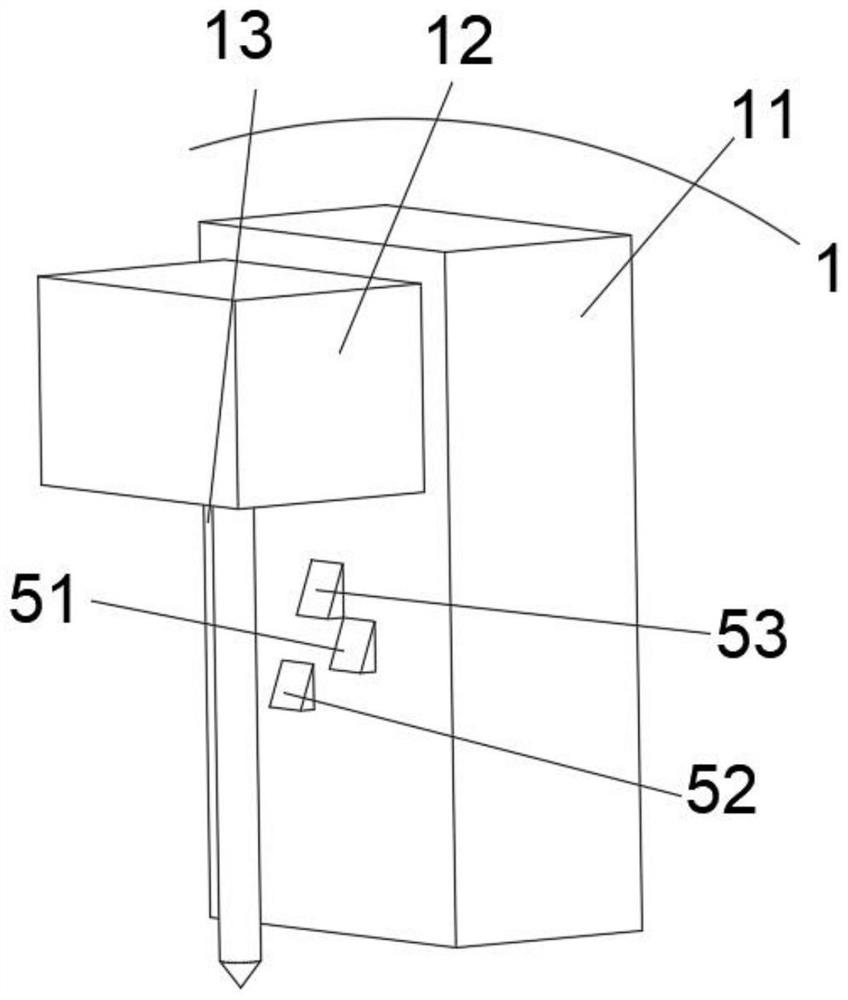
[0029] see Figure 1-6 , the present invention provides technical scheme: as Figure 1-6 , a high-precision drilling device for industrial robot arm joint processing, including a drilling device 1, the drilling device 1 includes a support table 11, a mobile table 12 is arranged on one side of the support table 11, and the support table 11 and the mobile table 12 are closely fitted, A drill bit 13 is arranged on the lower side of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More