

Quadruped robot motion control self-generation and real object migration method
A quadruped robot, robot motion technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as staying, large model differences, poor stable gait, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. Note that the aspects described below in conjunction with the drawings and specific embodiments are only exemplary, and should not be construed as limiting the protection scope of the present invention.
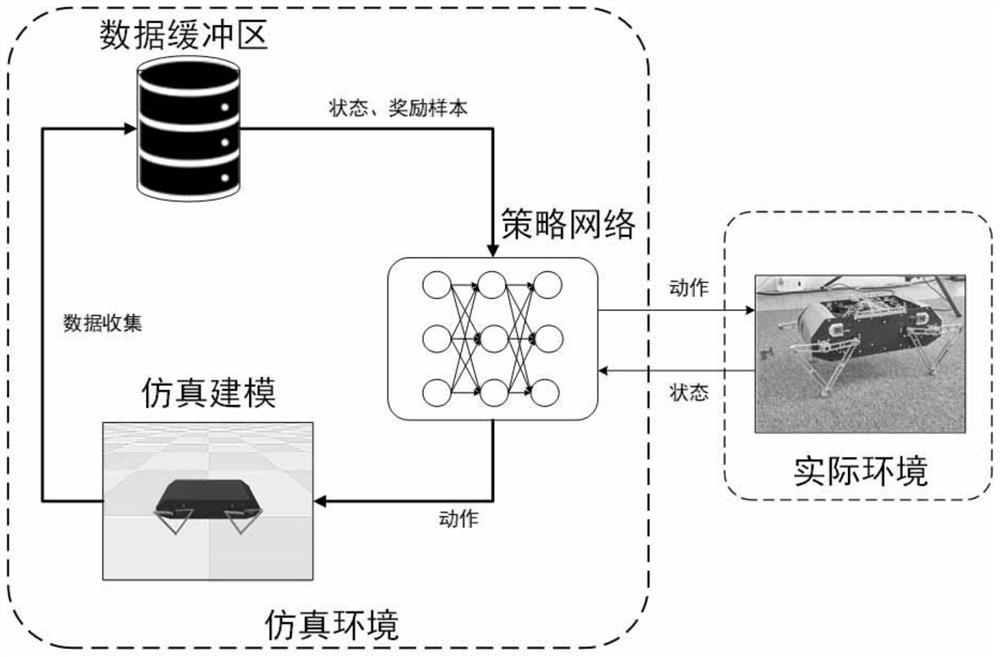
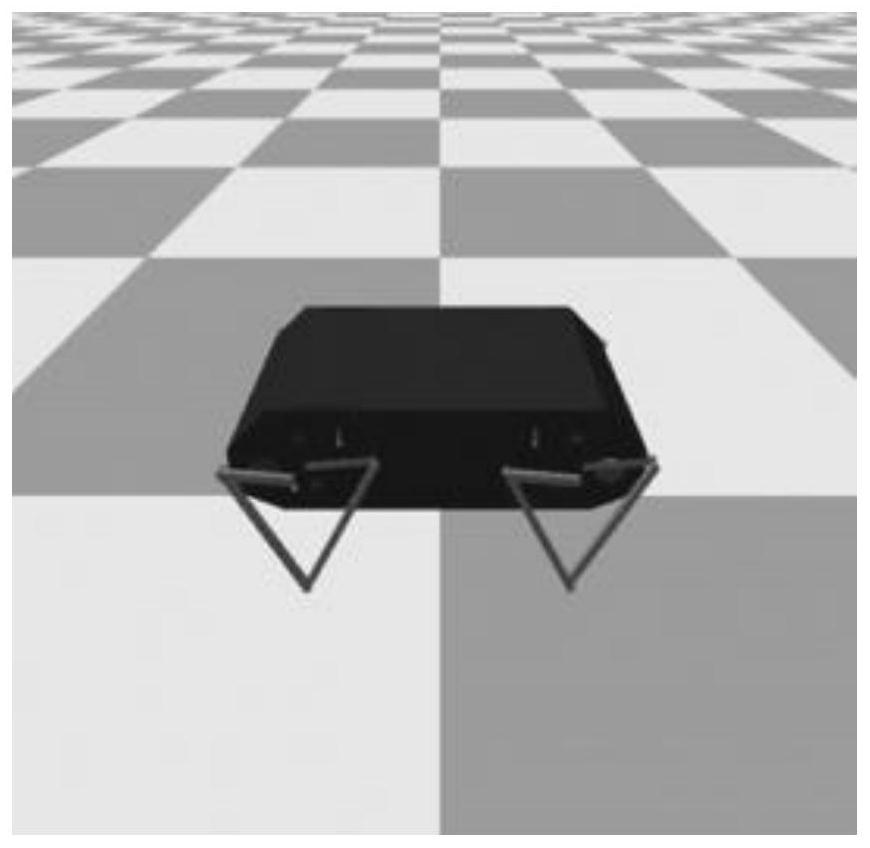
[0037] The quadruped robot model is constructed according to the physical properties of the actual quadruped robot through the Bullet physics engine.
[0038] The physical properties of the surrounding environment take into account the friction of the ground and the external forces on the robot, such as figure 2 shown.
[0039] Through the method of system identification, the difference between the simulation model and the physical model is narrowed, and the parameters to be determined are sorted out: robot mass, motor friction, control delay, contact friction, moment of inertia, and motor model.
[0040] The mass of the robot is measured b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More