

Omni-bearing mobile investigation detector, control system and control method
An all-round mobile and detector technology, applied in the field of drones, can solve problems such as poor endurance, poor mobility, and limited functions, and achieve the effects of strong mobility, improved mobility, and strong functionality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
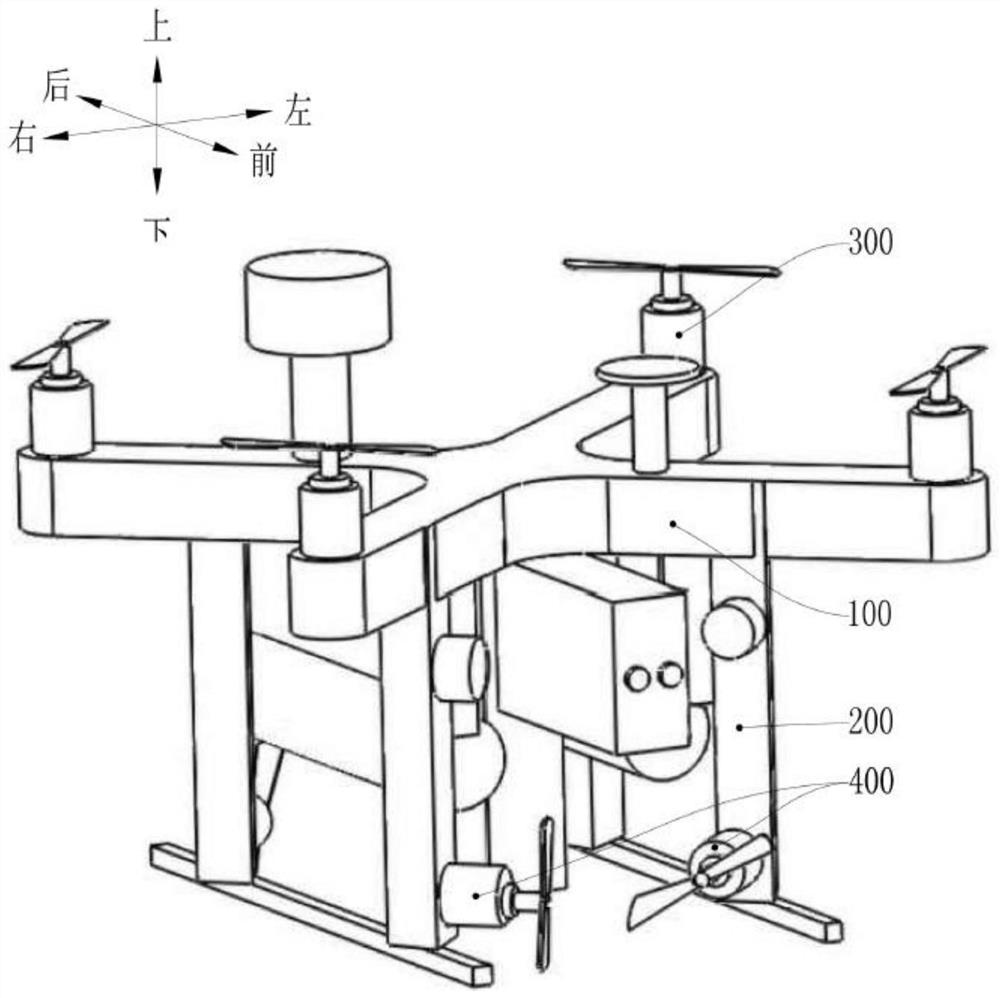
[0097] refer to figure 1 , the present invention discloses an omnidirectional mobile detection detector, including an X-shaped wing 100 , a mounting frame 200 , a main rotor assembly 300 and an auxiliary rotor assembly 400 . The mounting frame 200 is disposed on the lower surface of the X-shaped wing 100 . The four main rotor assemblies 300 are arranged on the upper end surfaces of the four ends of the X-shaped wing 100 in one-to-one correspondence. The rotor rotation axis of each main rotor assembly 300 is respectively perpendicular to the upper surface of the X-shaped wing 100 . The two auxiliary rotor assemblies 400 are arranged on the installation frame 200 . The two auxiliary rotor assemblies 400 are located on the same side of the X-shaped wing 100, the rotor rotation axes of the two auxiliary rotor assemblies 400 are on the same horizontal plane and are perpendicular to each other, the rotors of the two auxiliary rotor assemblies 400 The included angle between the ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More