Robot hand-eye calibrating posture selection method and device, robot system and medium
A robot hand and hand-eye calibration technology, applied in the field of robot systems, robot hand-eye calibration pose selection, computer equipment and storage media, can solve the problems of visual information affecting calibration results, poor versatility, and difficulty in implementation, etc., to reduce errors , position dispersion, and the effect of increasing the difference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
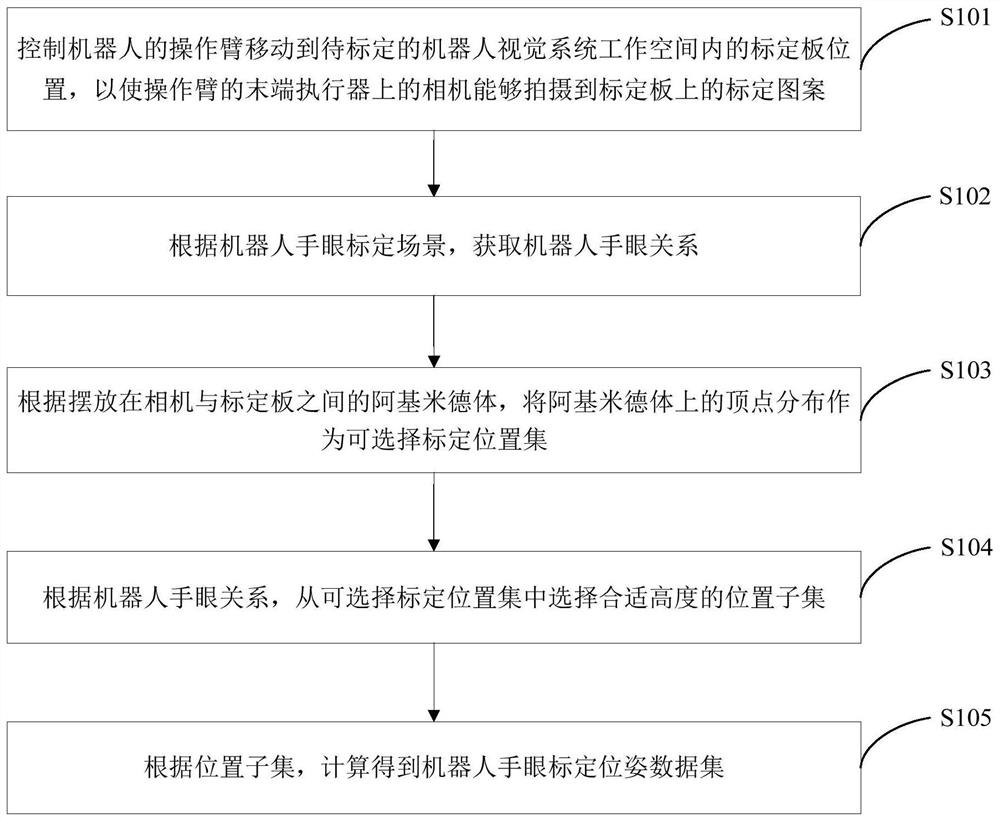
[0064] Such as figure 1 As shown, this embodiment provides a method for selecting the hand-eye calibration pose of a robot. The method is applied to a robot system and uses the geometric characteristics of the Archimedes body to select an efficient and reasonable hand-eye calibration pose, so as to improve the accuracy of hand-eye calibration and efficiency, including the following steps:
[0065] S101. Control the manipulating arm of the robot to move to the position of the calibration plate in the working space of the robot vision system to be calibrated, so that the camera on the end effector of the manipulating arm can capture the calibration pattern on the calibration plate.
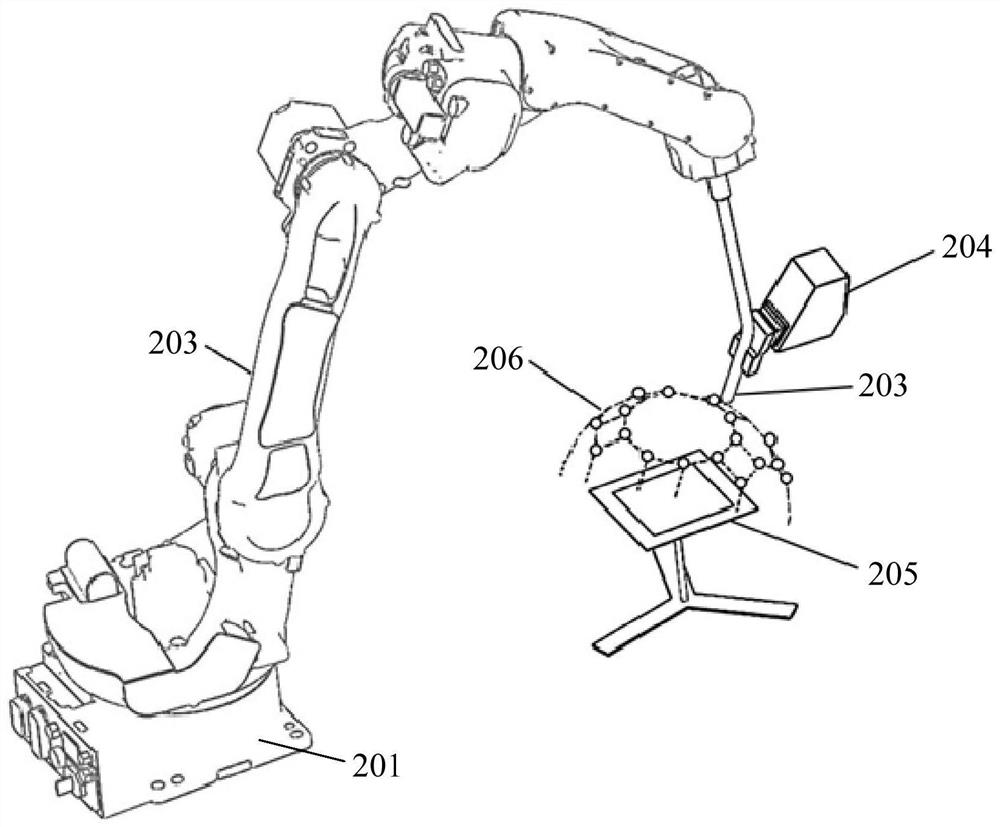
[0066] The robot system of this embodiment includes a connected control device and a robot. The control device can be a computer, etc. The environment configuration of the robot's hand-eye calibration is as follows: figure 2 As shown, the robot includes a base 201, an operating arm 202, an end eff...
Embodiment 2
[0099] Such as Figure 4 As shown, the present embodiment provides a robot hand-eye positioning pose selection device, which includes a control module 401, a hand-eye relationship acquisition module 402, a calibration position set acquisition module 403, a selection module 404, and a calculation module 405. The specific details of each module The function is as follows:
[0100] The control module 401 is used to control the manipulating arm of the robot to move to the position of the calibration plate in the working space of the robot vision system to be calibrated, so that the camera on the end effector of the manipulating arm can capture the calibration pattern on the calibration plate.
[0101] The hand-eye relationship acquiring module 402 is configured to acquire the robot's hand-eye relationship according to the robot hand-eye calibration scene.
[0102] The calibration position set acquisition module 403 is used to use the vertex distribution on the Archimedes body as ...
Embodiment 3
[0107] This embodiment provides a computer device, which may be a computer, such as Figure 5 As shown, it includes a processor 502 connected through a system bus 501, a memory, an input device 503, a display 504, and a network interface 505. The processor is used to provide computing and control capabilities. The memory includes a non-volatile storage medium 506 and internal Memory 507, the non-volatile storage medium 506 stores an operating system, computer programs and databases, the internal memory 507 provides an environment for the operation of the operating system and computer programs in the non-volatile storage medium, and the processor 502 executes memory storage During the computer program, realize the robot hand-eye mark position selection method of above-mentioned embodiment 1, as follows:
[0108] Control the manipulating arm of the robot to move to the position of the calibration plate in the working space of the robot vision system to be calibrated, so that the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More