

Blade finishing operation robot system
A kind of working robot and robot technology, which is applied in the direction of grinding frame, grinding machine parts, manufacturing tools, etc., can solve the problems of low machining accuracy and surface quality accuracy, low degree of automation, and low efficiency of workpieces, and achieve a solution Processing cost and surface quality problems, improving processing efficiency, and improving the effect of the working environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to make the embodiments, technical solutions and advantages of the present invention more obvious, the technical solutions of the present invention will be described clearly and completely below with reference to the accompanying drawings. Obviously, the described embodiments are a part of the embodiments of the present invention, not all of them. Example. It should be understood by those skilled in the art that these embodiments are only used to explain the technical principle of the present invention, and are not intended to limit the protection scope of the present invention.
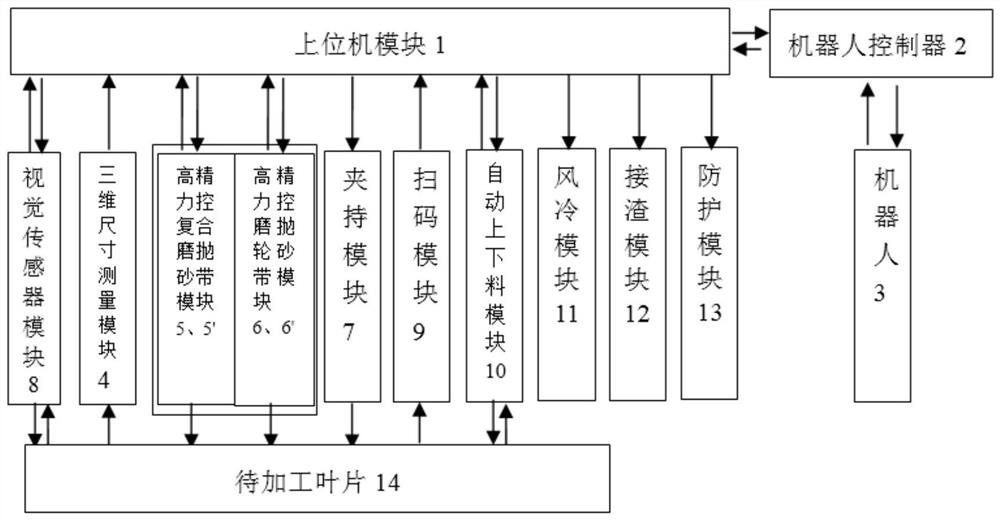
[0059] A blade finishing robot system of the present invention includes a host computer module, a robot, a three-dimensional size measurement module, a first grinding and polishing module and a second grinding and polishing module respectively connected to the host computer module in communication;
[0060] The robot is used to execute the control instruction of the upper computer mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More