

Intelligent fire-fighting robot control method based on three-dimensional point cloud model
A fire-fighting robot, three-dimensional point cloud technology, applied in fire rescue and other directions, can solve problems such as no closed solution, complex robot kinematics inverse solution, and inability to obtain closed solutions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
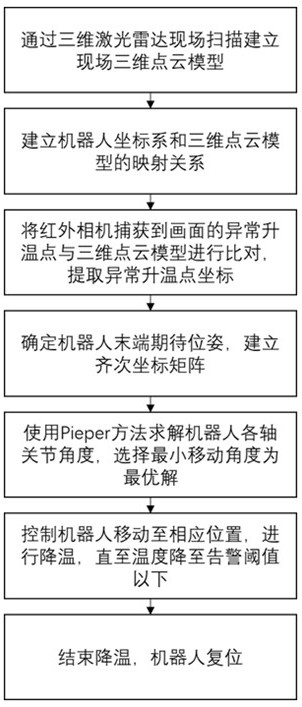
[0083] The following is a more detailed description in conjunction with the infrared camera, slider motor, and pump group zone control valve carried by the intelligent fire-fighting robot. refer to figure 1 , the concrete process of the present invention is as follows:
[0084] Step 1: Establish a 3D point cloud model of the site through 3D laser radar on-site scanning:
[0085] The laser point cloud data of the substation site is obtained by 3D laser radar scanning, and the 3D point cloud model of the site is established.
[0086] Step 2: Establish the mapping relationship between the robot coordinate system and the 3D point cloud model:
[0087] Power on the robot, lower the column motor to the bottom of the column; manually adjust the axes through the buttons on the robot teach pendant, so that the connecting rods between the second axis and the third axis of the robot are perpendicular to the column, and the connecting rods of the third axis and the fourth axis are perpe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More