

Semantic segmentation and point cloud processing combined plant recognition and model construction method
A semantic segmentation and construction method technology, applied in biological neural network models, scene recognition, neural learning methods, etc., can solve the problems of plant scene construction distortion, distortion, and inability to accurately identify plant species in oblique photography images, etc., to speed up the recognition speed and efficiency, to achieve the effect of precise identification and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
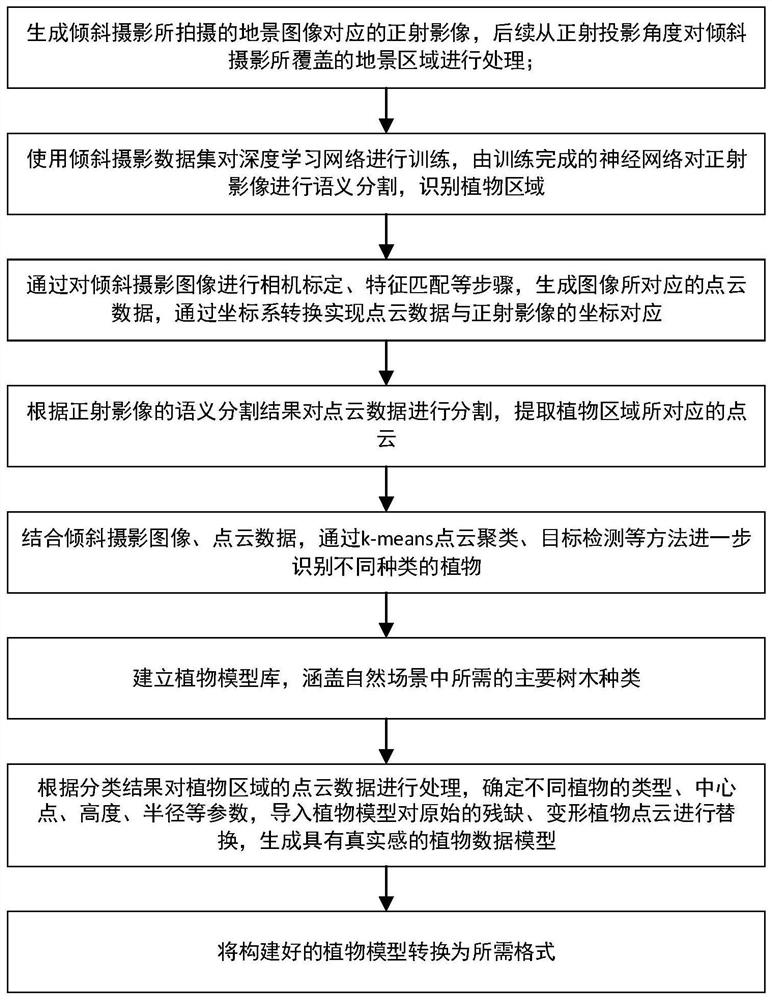
[0103] The first step: generates a positive shot image corresponding to the scenario image captured by the tilt photography, followsseeted from the normalized projection angle to process the scenario area covered by the tilt photography.
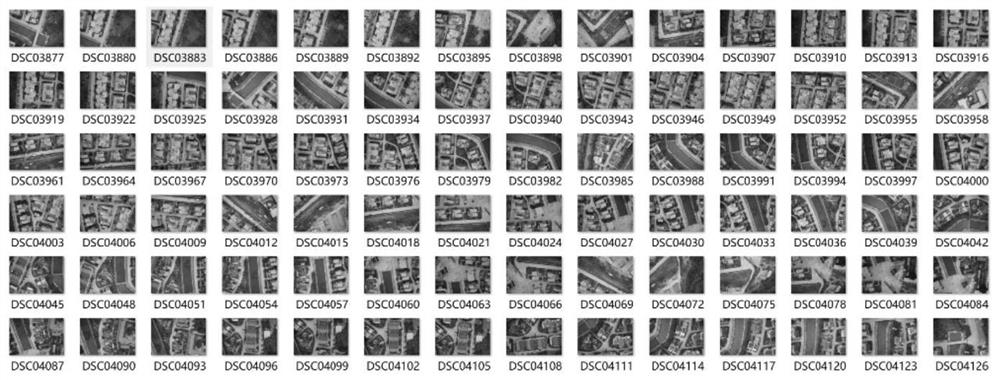
[0104] A scenic view photographed by a drone carrying a tilt camera figure 2 As shown, the acquisition of the realization multi-view information is achieved by multi-angle camera air shooting. First, by the camera position calibration, feature extraction, matching, etc., the collected tilt photographic image is converted to a positive image, and the orthodontic image is a remote sensing image having a positive injection projection property, which can correct the original image because of the sensor state change and surface Distortion and distortion caused by factors, the generated orthodontic image effect is like image 3 Indicated.
[0105] Step 2: Training the deep learning network using the tilt photographic data set; the neural network comple...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More