

Arc 8-shaped swing arc path planning algorithm capable of quickly adjusting posture of welding gun
A fast-adjustment, figure-of-eight technology, applied in the direction of welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of inability to adjust welding process parameters, low work efficiency, low teaching time, etc., and shorten the teaching time time, reduce operating time, improve welding efficiency and welding quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0104] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
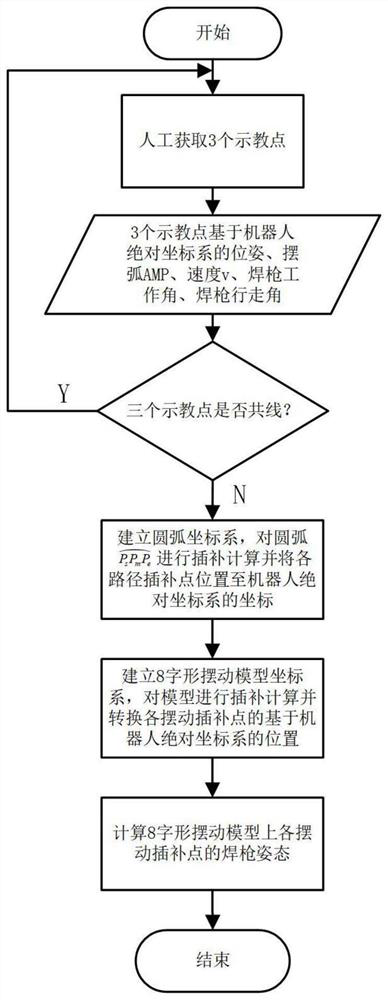
[0105] as attached figure 1 As shown in the flow chart, the present invention discloses a planning algorithm for the circular arc figure-of-eight swing path that can quickly adjust the posture of the welding torch, including the following steps:
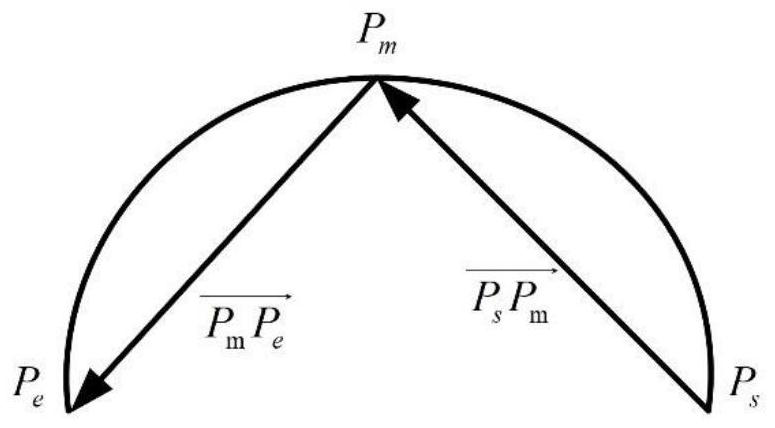
[0106] Step 1: Acquisition of teaching points: Obtain a 3 teaching points P through manual teaching s ,P m and P e ;
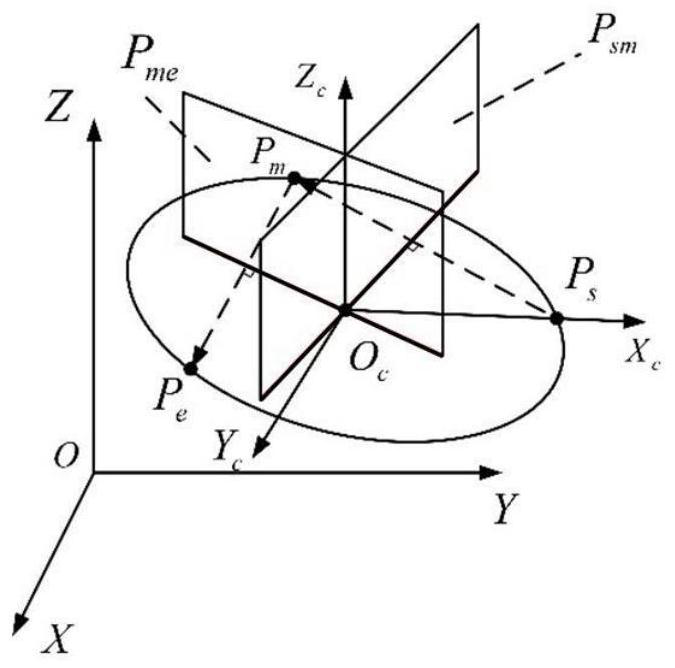
[0107] Step 2: Take 3 teaching points P s ,P m and P e defined arc O c Establish an arc coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More