

Four-rotor unmanned aerial vehicle attitude control method based on linear active disturbance rejection control
A linear active disturbance rejection and control method technology, applied in attitude control, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as control quality degradation, system instability, and tracking performance deterioration, and achieve improved Effects of dynamic characteristics, enhanced robustness, and improved tolerance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
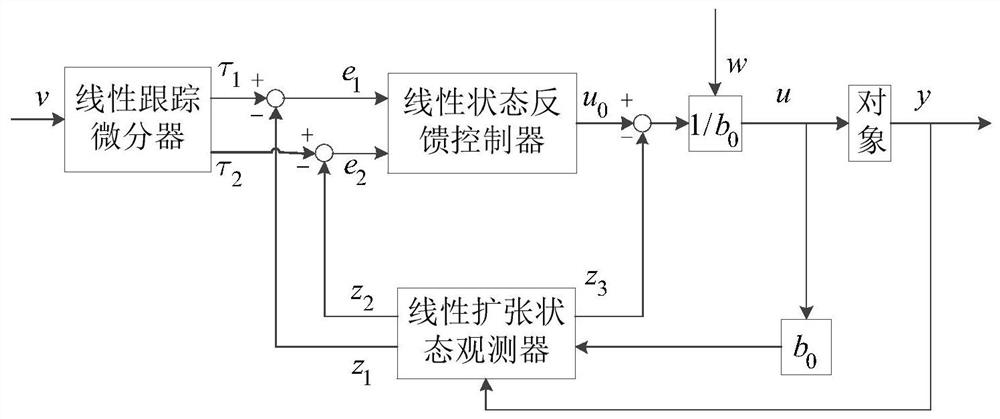
[0043] Such as figure 1 As shown, a quadrotor UAV attitude control method based on linear ADRC includes the following steps:
[0044] Step 1. Before designing the attitude controller of the quadrotor UAV, it is first necessary to establish a mathematical model of the quadrotor UAV. Combining the theory of rotor aerodynamics and wind field models such as turbulence and wind shear, and using the Newton-Euler angle method, the angular dynamics model of the quadrotor UAV under wind disturbance is established, and its mathematical expression is:
[0045]
[0046] Among them, I x ,I y ,I z They are the moments of inertia on the x, y, and z axes respectively, and d is the distance from the center of the rotor to the origin of the coordinates of the body, that is, the axis radius, W x ,W y ,W z is the wind disturbance consisting of induced velocity, wind shear and turbulence, u i (i=2, 3, 4) are the roll channel control amount, the pitch channel control amount and the yaw ch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More