

Bionic crossed fishbone-shaped continuum robot mechanical arm
A continuum and robot technology, applied in the field of robotics, can solve the problems of the influence of the motion accuracy of the mechanical arm, the increase in the complexity of theoretical modeling, and the impact of modeling accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in further detail through specific examples below, and other examples will not be repeated here one by one, but the implementation mode of the present invention is not limited to the following examples.
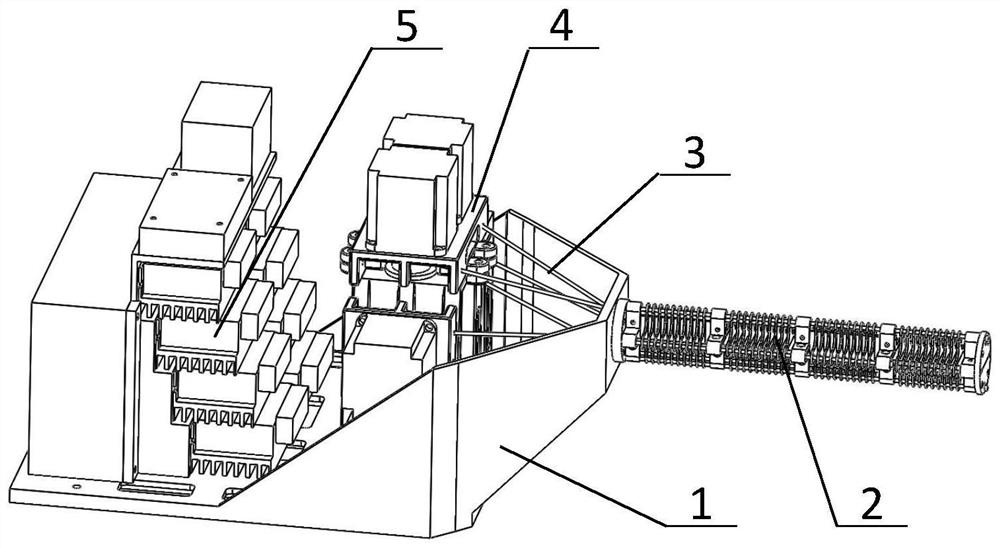
[0050] In order to solve the problem that the theoretical modeling of the traditional continuum robot manipulator is complex and the control accuracy of the manipulator needs to be improved, this invention is inspired by the body swing posture and the fish bone structure when the fish swims, imitating the bone characteristics of the fish, and developing a bionic crossover Fishbone-shaped continuum robotic arm. Such as figure 1 As shown, it includes a box body 1 , a flexible robot arm 2 , a driving rope 3 , a driving motor module 4 and a control module 5 . One end of the flexible manipulator 2 is fixed on the box body 1 by bolts; the driving rope 3, the driving motor module 4 and the control module 5 are fixed in the box body 1; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More