Flight speed protection method and system for oil-driven unmanned helicopter and computer device
An unmanned helicopter, flight speed technology, applied in the control/regulation system, non-electric variable control, vehicle position/route/altitude control, etc. stability, high engineering application value, and the effect of preventing false positives and false positives
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
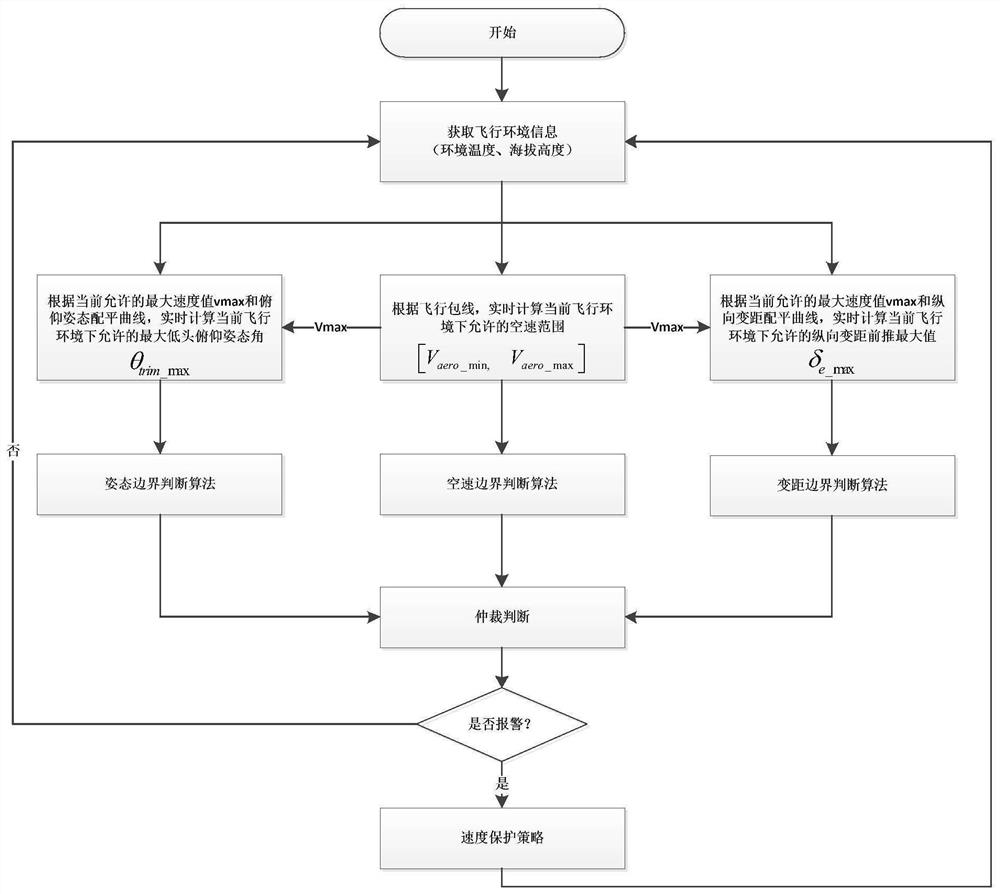
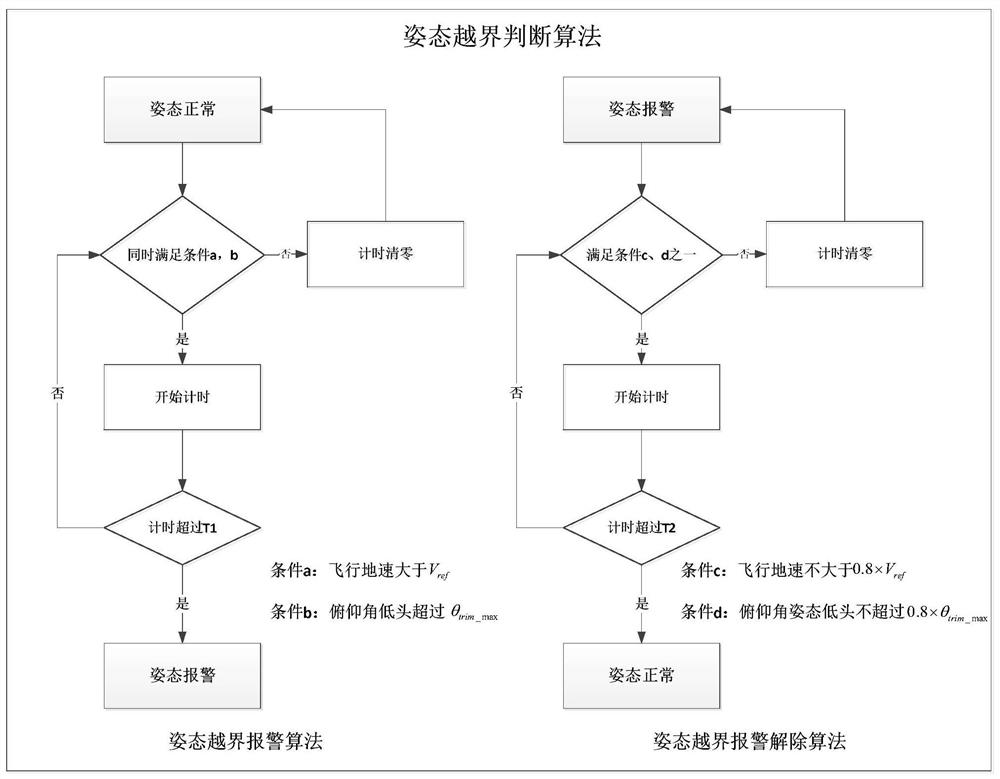
[0109] For a surveying and mapping flight mission, the altitude of the take-off point is 1500m, and the flight environment temperature is 15°C. The ground speed boundary of a certain type of oil-powered unmanned helicopter in this environment is V ref , the airspeed boundary is V aero_max , the pitch angle attitude boundary is θ trim_max °, the control boundary of longitudinal variable pitch is δ e_max . Due to airflow disturbance factors, the unmanned helicopter triggered an attitude out-of-bounds alarm during the accelerated flight process. Under the action of the protection method proposed in this paper, the UAV system automatically adjusts the flight speed to a safe range to ensure flight safety.
[0110] Such as Figure 8 ~ Figure 10 As shown, the ground speed of the UAV exceeds the ground speed boundary V at 6’03” ref , the pitch angle exceeds the pitch angle attitude boundary at 6'04". Then, the ground speed and pitch angle exceed the corresponding boundary T1 time ...
Embodiment 2
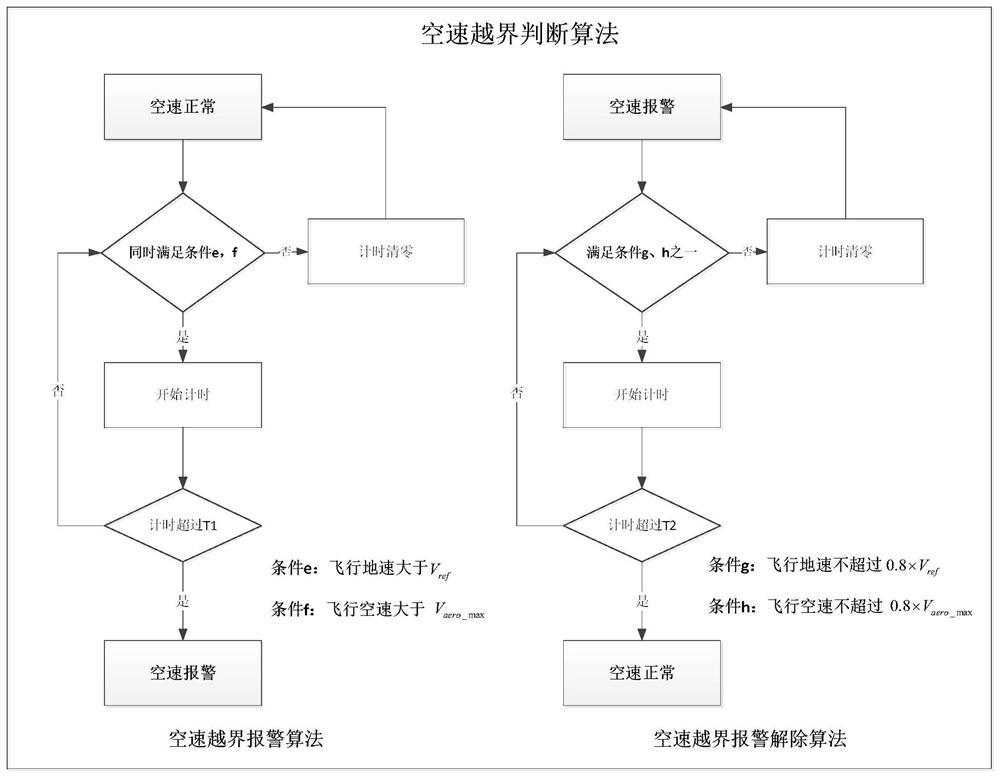
[0114] For a surveying and mapping flight mission, the altitude of the take-off point is 3500m, and the flight environment temperature is 5°C. The ground speed boundary of a certain type of oil-powered unmanned helicopter in this environment is V ref , the airspeed boundary is V aero_max , the pitch angle attitude boundary is head down θ trim_max , the control boundary of longitudinal variable pitch is δ e_max . Due to airflow disturbance factors, the unmanned helicopter triggered an airspeed cross-border alarm during the accelerated flight process. Under the action of the protection method proposed in this paper, the UAV system automatically adjusts the flight speed to a safe range to ensure flight safety.
[0115] Such as Figure 12 to Figure 14 As shown, the ground speed of the UAV exceeds the ground speed boundary V at 5’17” ref , the airspeed exceeds the airspeed boundary V at 5'23" aero_max . Subsequently, the ground speed and airspeed exceeded the boundary at the ...
Embodiment 3
[0119] For a power inspection flight mission, the altitude of the take-off point is 2500m, and the flight environment temperature is 5°C. The ground speed boundary of a certain type of oil-powered unmanned helicopter in this environment is V ref , the airspeed boundary is V aero_max , the pitch angle attitude boundary is head down θ trim_max , the control boundary of longitudinal variable pitch is δ e_max . Due to airflow disturbance factors, the unmanned helicopter triggered a range-variable cross-border alarm during the acceleration flight process. Under the action of the protection method proposed in this paper, the UAV system automatically adjusts the flight speed to a safe range to ensure flight safety.
[0120] Such as Figure 16 ~ Figure 18 As shown, the drone's ground speed exceeds the ground speed boundary V at 6'35" ref , the longitudinal pitch exceeds the longitudinal pitch boundary δ at 6’35” e_max . Subsequently, the ground speed and the longitudinal variabl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More