

Preparation and use method of a microscopic intelligent robot and a microscopic magnetic gripper
An intelligent robot and microscopic technology, applied in the direction of micro-manipulators, manipulators, manufacturing tools, etc., can solve the problems of limiting the scope of application of micro-tweezers, achieve the effect of improving strength and rigidity, simple method, and simple manufacturing method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
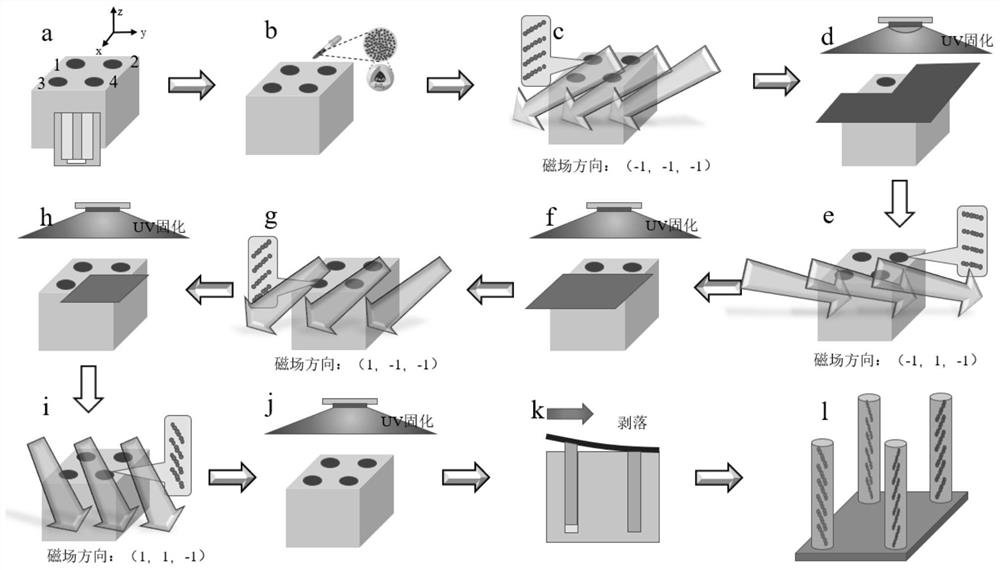
[0044] like Figure 1-5 and Figure 8-9 As shown, the method for preparing and using a micron-level microscopic intelligent robot in this embodiment includes the following steps:
[0045] Step 1: Fill the particles (the non-magnetic substance SiO 2 Encapsulated magnetic particles Fe 2 O 3 ) of the nanocomposite resin Bis-GMA / TEGDMA (filling particle mass fraction of 15%) was dropped onto the silicon template substrate (the diameter of the substrate cavity was 5 μm), and the resin was infiltrated into the column cavity of the silicon template substrate through a vacuum-assisted molding process. to form product I;
[0046] Step 2: Place two parallel magnets on the product I along the direction of the vector (-1, -1, -1), and two parallel magnets are placed at equal distances from both ends, so that the product I is subjected to the direction of the vector (-1, -1, -1). magnetic field, so that the magnetic particles are oriented along the current magnetic field direction in ...
Embodiment 2
[0061] Example 2 has the same steps as Example 1, except that: in step 1, the mass fraction of magnetic particles in the mixed solution is 10-30%.
Embodiment 3
[0063] The steps of embodiment 3 are identical with those of embodiment 1, and the difference is: in step 1, the magnetic particles are Fe, Fe 2 O 3 , Fe 3 O 4 , one or more of Co and Ni.
PUM
| Property | Measurement | Unit |
|---|---|---|
| quality score | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More