

Method and device for controlling dental implant
A technology for dental implants and instruments, which is applied in the fields of dental implants, dentistry, and dental restorations. It can solve problems such as the inability to control burs through observation, increase the difficulty of doctors' operations, and inconvenience dental implant surgery, so as to improve stability and improve implant stability. The effect of improving the accuracy of input, reducing the risk of surgery, and reducing the difficulty of operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
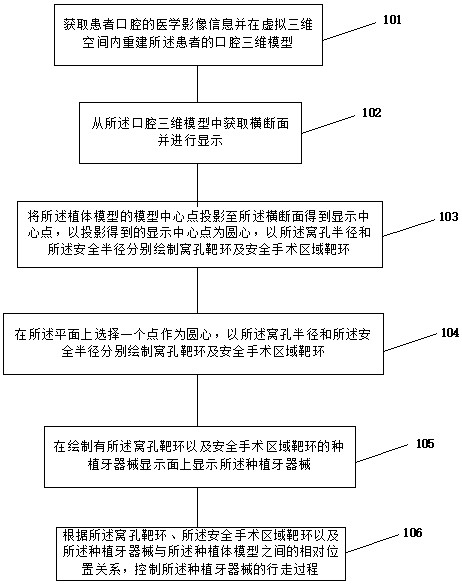
[0089] refer to figure 1 , which shows a structural block diagram of a dental implant device operation display method according to the present invention, which may specifically include:
[0090] Step 101: Obtain medical image information of a patient's oral cavity and reconstruct a three-dimensional model of the patient's oral cavity in a virtual three-dimensional space.
[0091] In the embodiment of the present invention, the medical image information of the oral cavity photographed and scanned by the patient can be obtained through the software system of the main control platform, and the medical image information can include CBCT (Cone Beam Computed Tomography, cone beam computerized tomography) ) images, including multiple layered scan images of the three-dimensional solid of the patient's oral cavity.
[0092] In the software system, a virtual three-dimensional space can be set, and based on the medical image information of the patient's oral cavity obtained above, the t...
Embodiment 2
[0189] Optionally, step 1062 in this embodiment of the present invention includes: substeps 1066-1067:
[0190] Sub-step 1066: Determine the first distance between the tip projection point of the tip of the dental implant instrument on the cross-section and the display center point;
[0191] Determine the tip projection point B (Bx, By) of the tip of the bur on the cross-section on the cross-section, and the coordinates of the display center point can be the projection point of point A on the cross-section calculated above, and the projection of point A The point coordinates are A(Ax, Ay), and the first distance LAB between the tip projection point and the display center point is calculated in the software system:
[0192] (Bx-Ax)²+(By-Ay)²=LAB²
[0193] Sub-step 1067: If the first distance is greater than the radius of the hole target ring, determine that the tip of the dental implant device deviates from the hole target ring.
[0194] According to the socket radius R1 obta...
Embodiment 3
[0203] refer to Figure 10 , shows a schematic structural view of a control device for a dental implant device in an embodiment of the present invention.
[0204] The dental implant device operating device 200 in the embodiment of the present invention includes: a model reconstruction module 210 , a display surface acquisition module 220 , a radius calculation module 230 , a target ring generation module 240 , a target ring drawing module 250 , and an instrument control module 260 .
[0205] The functions of each module and the interaction between each module are introduced in detail below.
[0206] A model reconstruction module 210, configured to acquire medical image information of the patient's oral cavity and reconstruct the patient's oral cavity three-dimensional model in a virtual three-dimensional space;
[0207] A display surface acquisition module 220, configured to acquire a cross-section from the three-dimensional model of the oral cavity and display it;
[0208] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More