Tactile sensor
A tactile sensor and contact surface technology, applied in instruments, force/torque/power measuring instruments, measuring devices, etc., can solve the problems of easy wear of sensors, vibration of small surfaces, large sensors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] Embodiments of the present invention and modifications thereof will now be described in detail with reference to the accompanying drawings.
[0063] sensor structure
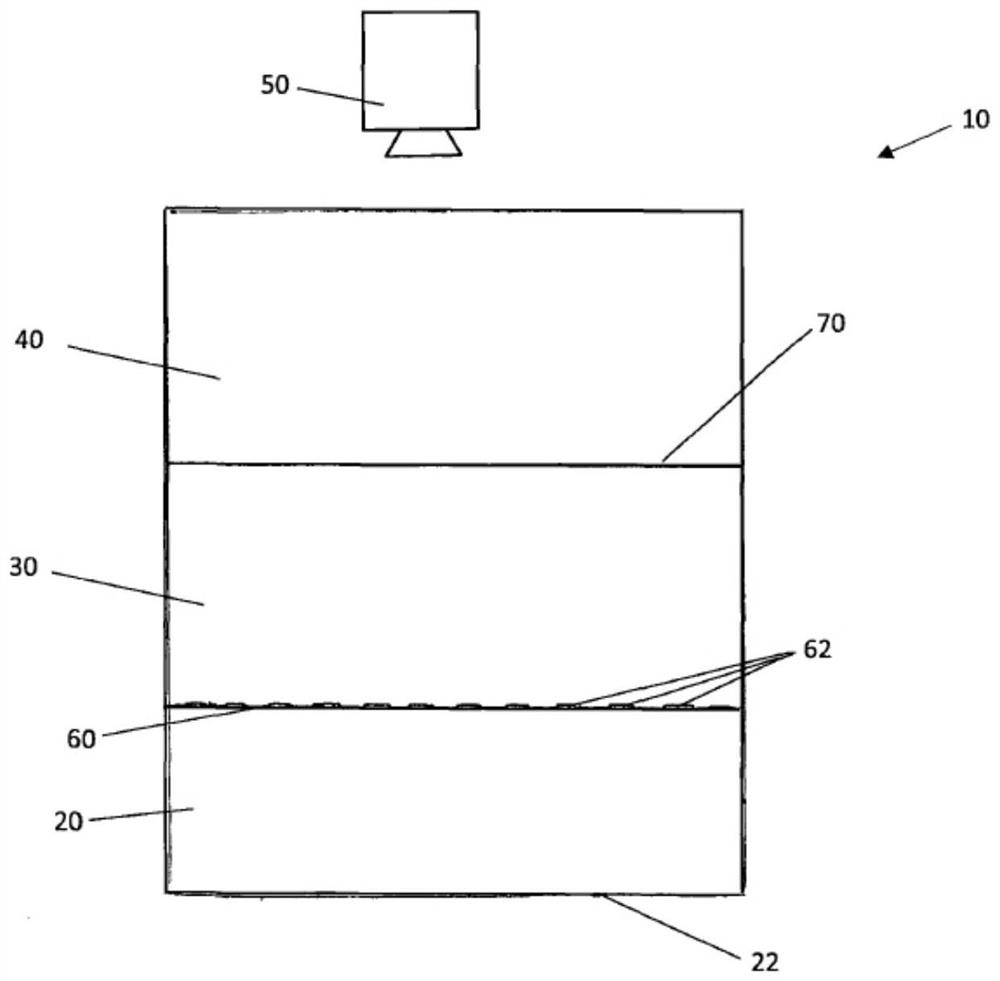
[0064] figure 1 A simplified schematic cross-sectional view of the general structure of an embodiment of a tactile sensor of the present invention is shown to illustrate principles of construction and operation. The tactile sensor 10 has three main parts: a flexible opaque outer layer 20 , a flexible transparent central layer 30 , a substantially rigid transparent inner layer 40 and a camera 50 .
[0065] The flexible opaque outer layer 20 is made of an opaque elastic material, and the flexible transparent layer 30 is made of a transparent elastic material. The two layers are in contact with each other at the first joint surface 60 .
[0066] The opaque layer 20 is sufficiently opaque that changes in external lighting cannot be detected by the camera. That is, a change in incident light on the outer s...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Width | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com