

Leap Motion interaction-based bionic robotic fish control system
A control system and robotic fish technology, applied in the field of bionic robotic fish, can solve the problem that the human-fish interaction system is not intuitive and friendly, and achieve the effect of friendly interaction and improved intuitiveness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The traditional control methods of bionic robotic fish mainly include man-machine interface, teaching pendant, and remote control. Most of the interaction methods rely on mouse, keyboard, touch screen, etc. The operation procedures are complicated and cumbersome and the interaction is not direct enough. The new intelligent voice control method is prone to misrecognition or even unrecognition problems in noisy schools, entertainment and other places. How to realize the effective control of the bionic fish and improve the intuitiveness of interaction between students and the robotic fish are problems to be solved in the prior art.
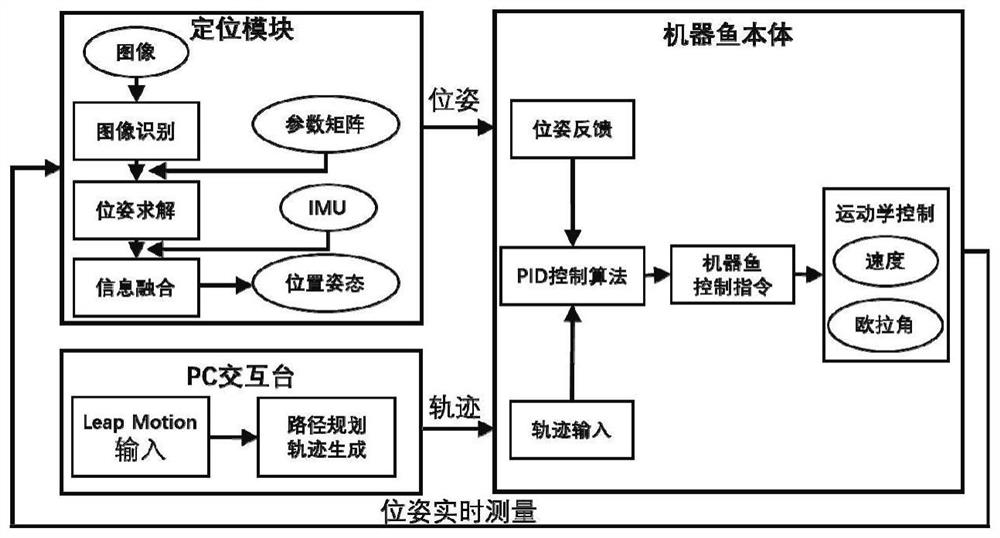
[0017] A bionic robotic fish control system and method based on Leap Motion interaction, different from traditional control and interaction methods, the operator can complete the path control of a single or multi-body robotic fish through the movement trajectory of a single finger or multiple fingers, improving human - Variety and intelligence...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More