

Step-by-step temperature compensation method for fiber-optic gyroscope
A technology of fiber optic gyroscope and temperature compensation, applied in neural learning methods, Sagnac effect gyroscopes, instruments, etc., can solve problems such as temperature drift, circuit equivalent phase error drift, poor generalization ability, etc., and achieve higher temperature Environmental adaptability, improved zero bias stability, and easy-to-achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The structure of the present invention will be further described below in conjunction with the accompanying drawings and through embodiments. It should be noted that this embodiment is illustrative rather than limiting.
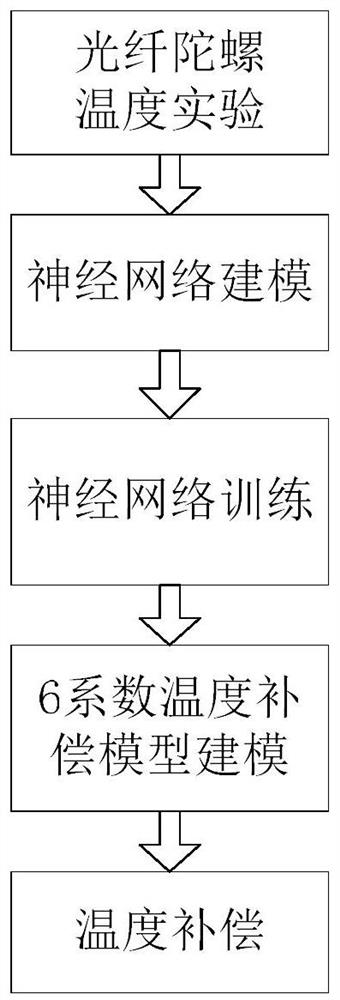
[0041] A step-by-step compensation method for fiber optic gyroscope, please refer to Figure 1-8 , its invention point is, comprises the following steps:
[0042] Step 1. Fiber optic gyroscope temperature experiment
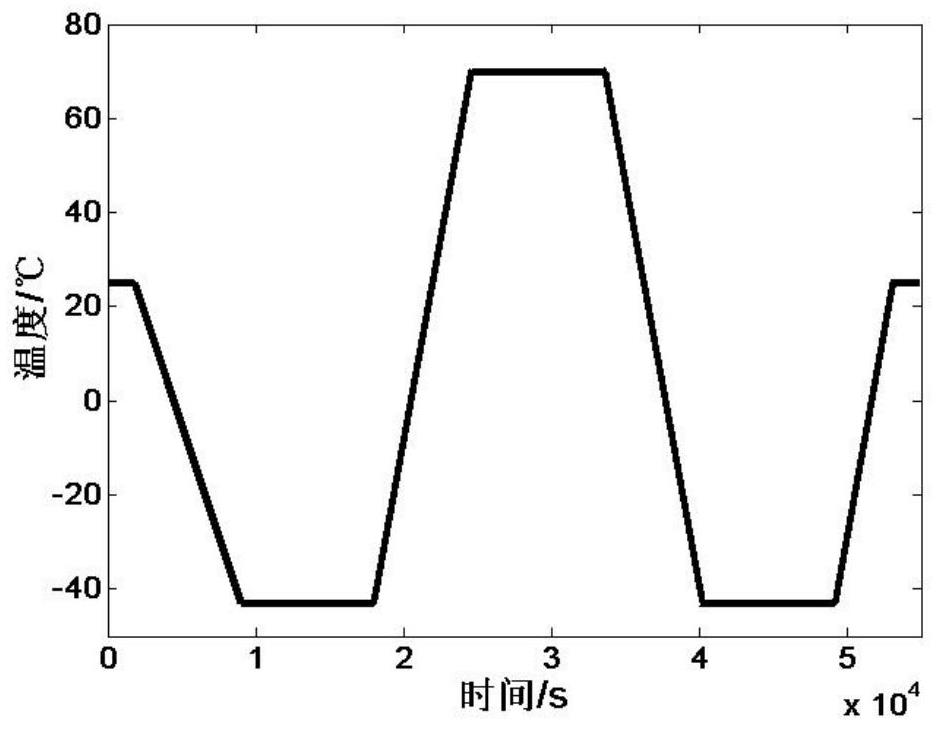
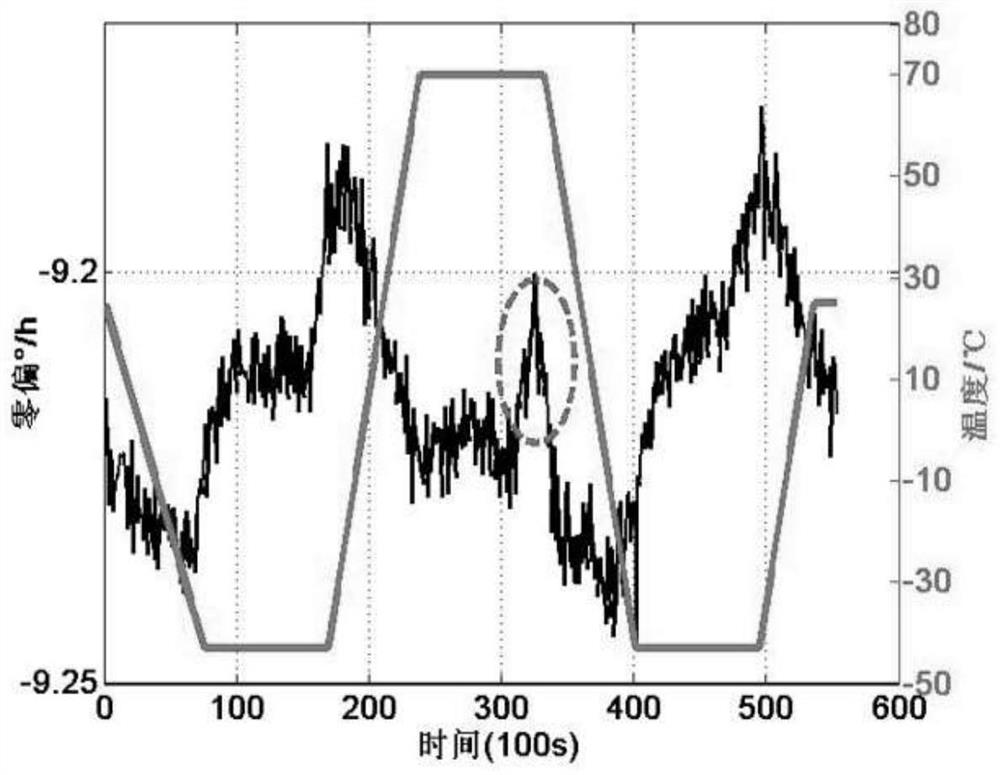
[0043] The normal temperature zero-bias stability of the experimental fiber optic gyroscope is 0.01° / h. The fiber optic gyroscope is placed in a high and low temperature test box with a vibration isolation table for testing. The sensitive axis of the gyroscope points to the sky. The temperature range of the test is -43°C- 70℃, detailed temperature curve as figure 2 shown. The data sampling interval is 1s, and the output angular velocity and temperature values of the gyroscope are collected at the same time, and the length of the sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More