

Two-arm cooperative head and neck auxiliary traction surgical robot and control method thereof
A surgical robot, head and neck technology, applied in surgical manipulators, surgical robots, surgery, etc., can solve the problems of robots with large task space, no active and passive compliant control, and narrow movement space, so as to achieve remote force perception, Guaranteed real-time control and high degree of system freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
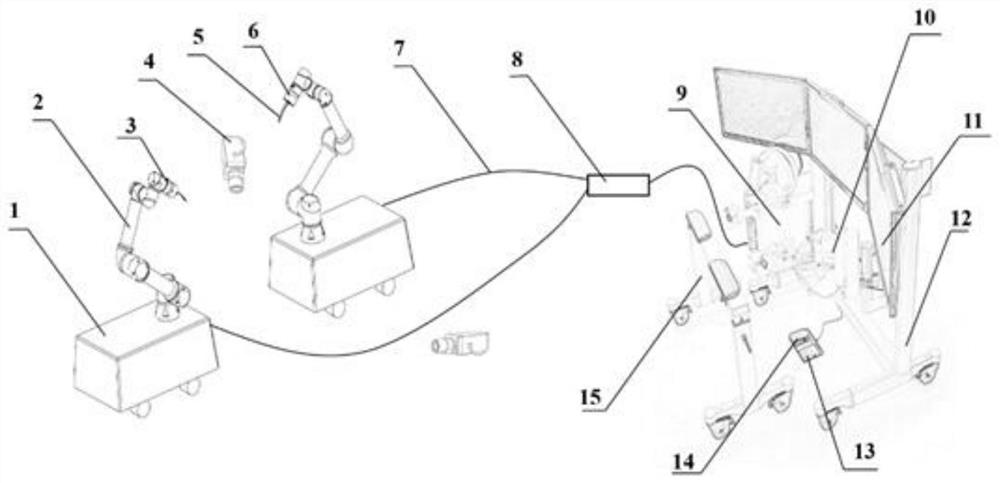
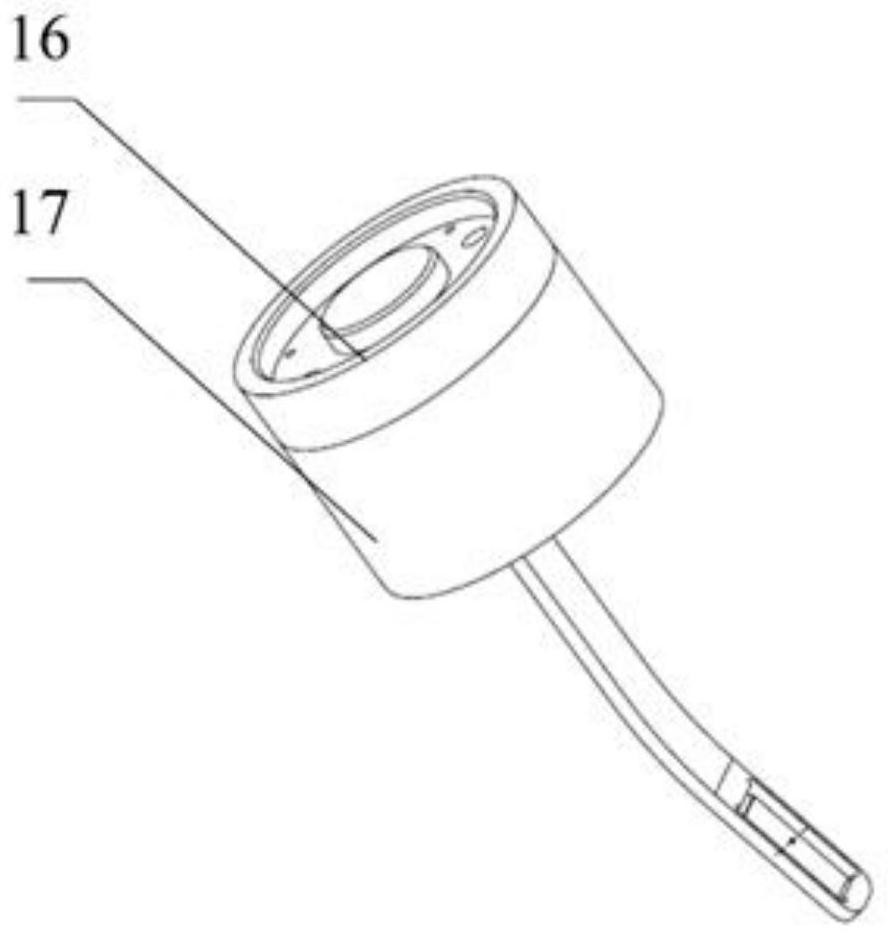
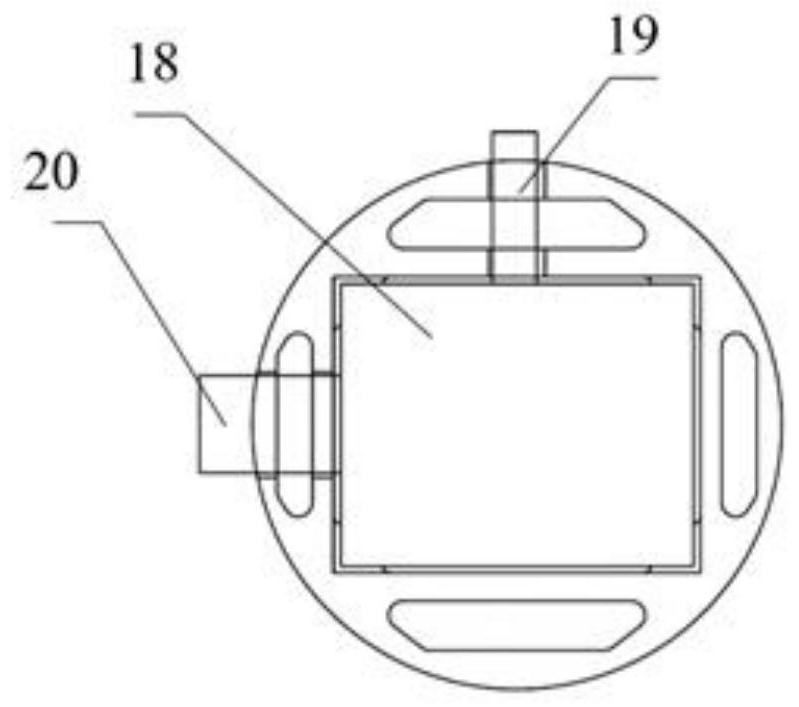
[0040] The embodiment of the present invention explains that the robot replaces the assistant in the operation process to help the doctor complete the pulling operation incision during the oral operation, expose the operation field, and assist the surgeon to complete the operation process. The control mode of the robotic arm 2 is the soft control mode. Such as figure 2 , image 3 , the surgical instrument 5 is installed on the sensor acquisition module integrated part 17, the sensor acquisition module 18 is built into the integrated part 17, the sensor signal line 20 passes through the gap on one side of the integrated part 17, and the sensor power line 19 passes through the other side of the integrated part 17. Out of the side hole, ensure that the appearance of the mechanical arm 2 and the surgical instrument 5 is clean and does not block th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More