

Water wall climbing robot control system
A wall-climbing robot and control system technology, applied in the general control system, control/regulation system, computer control, etc., can solve the problems of inability to cross the water-cooled wall tube, insufficient load capacity, and low detection efficiency, so as to reduce the risk of accidents, Simple operation and unified interface
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
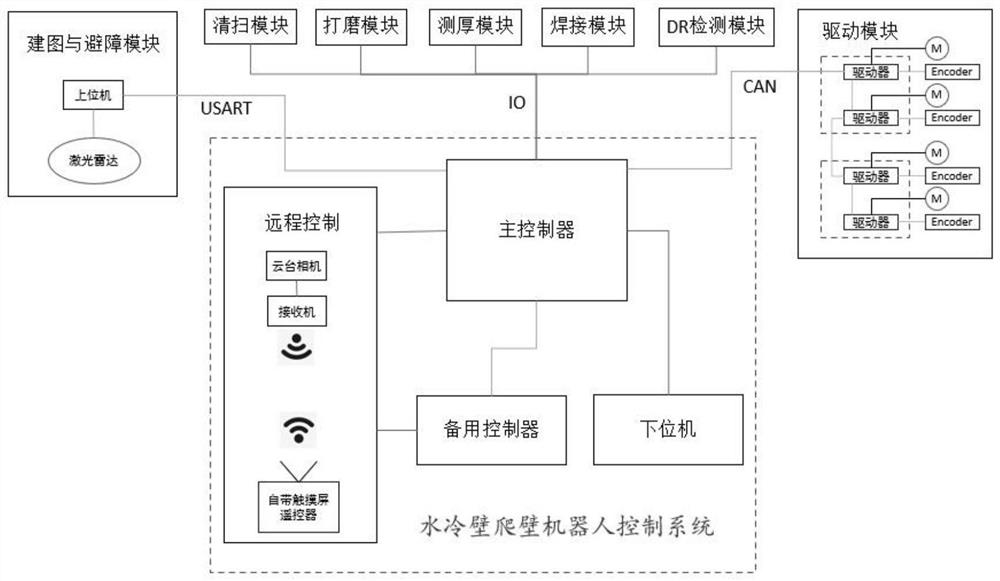
[0026] refer to Figure 1-6 , a control system for a water-cooled wall-climbing robot, comprising: a control module, a mapping and obstacle avoidance module and a drive module signal-connected to the control module, and a functional module signal-connected to the control module; the control module includes The main control module, the remote control module signal-connected with the main control module, the lower computer and the standby controller signal-conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More