

Unmanned equipment road surface obstacle detection method and device, unmanned equipment and storage medium
An obstacle detection and equipment technology, applied in image analysis, image enhancement, instruments, etc., can solve problems such as missed obstacle detection, limited vertical resolution, and affecting the normal operation and safety of unmanned equipment, so as to improve safety, The effect of improving resolution and improving detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
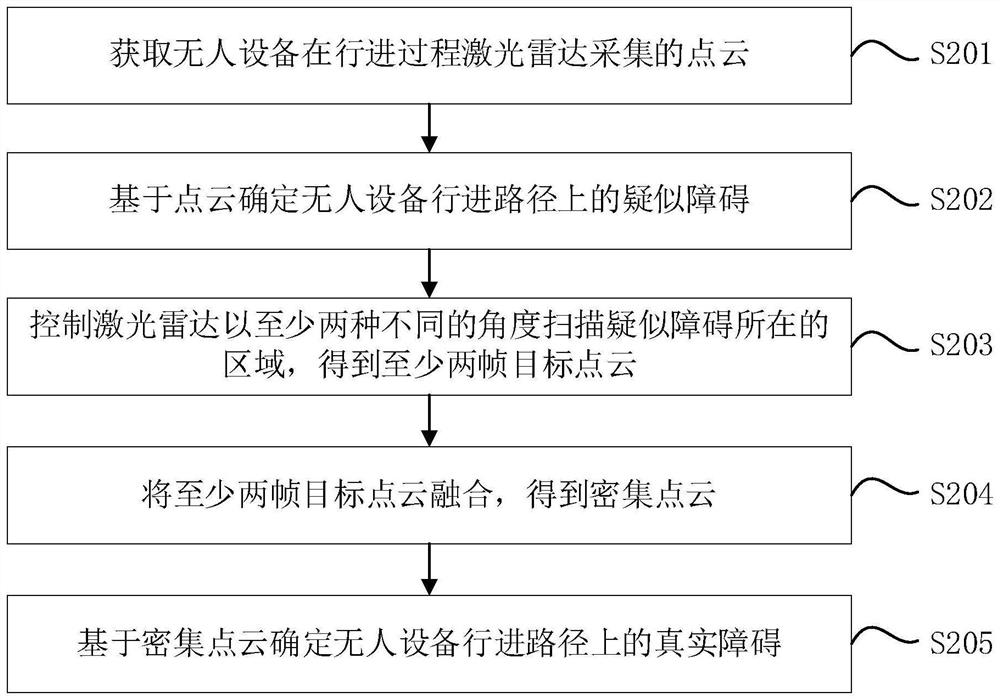
[0069] figure 2 This is a flowchart of an unmanned equipment road obstacle detection method provided in Embodiment 1 of the present invention. This embodiment is applicable to the detection of small road obstacles, and the method can be implemented by the unmanned equipment road obstacle detection device provided by the embodiment of the present invention. to execute, the apparatus may be implemented in software and / or hardware, and configured in the unmanned equipment provided by the embodiments of the present invention, such as figure 2 As shown, the method specifically includes the following steps:
[0070] S201 , acquiring a point cloud collected by the lidar during the traveling process of the unmanned device.
[0071] During the traveling process of the unmanned equipment, the unmanned equipment drives the lidar to continuously scan the environment around the unmanned equipment. Lidar emits a laser beam consisting of multiple (eg 32 or 64 lines) lasers and receives r...
Embodiment 2
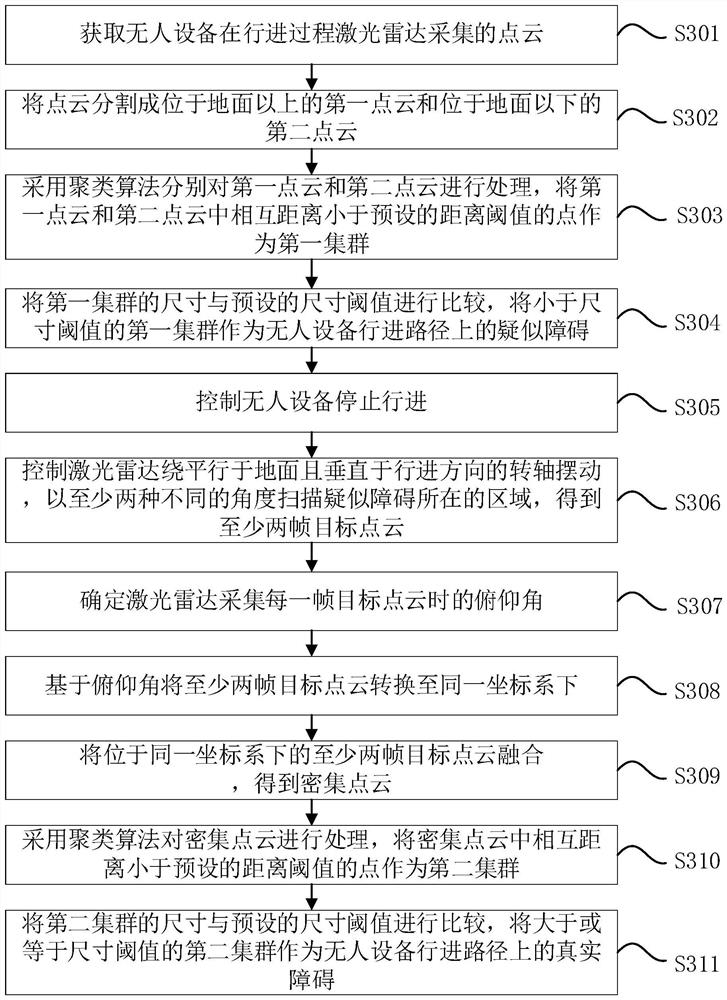
[0084] Figure 3A This is a flowchart of a method for detecting road obstacles by unmanned equipment provided in Embodiment 2 of the present invention. This embodiment is refined on the basis of the above-mentioned Embodiment 1, and describes in detail the steps in the method for detecting road obstacles by unmanned equipment. The specific implementation process, such as Figure 3A As shown, the method includes:
[0085] S301. Acquire a point cloud collected by the lidar during the traveling process of the unmanned device.
[0086] During the traveling process of the unmanned equipment, the unmanned equipment drives the lidar to continuously scan the environment around the unmanned equipment to obtain point clouds.
[0087] In the embodiment of the present invention, the unmanned equipment is cleaning equipment such as sweeping robots and unmanned sweeping vehicles. Common application environments of such equipment include urban roads, parks, sidewalks, etc., and the road co...
Embodiment 3
[0134] Figure 4 A schematic structural diagram of a road obstacle detection device for unmanned equipment provided in Embodiment 3 of the present invention, such as Figure 4 As shown, the device includes:
[0135] The point cloud acquisition module 401 is used to acquire the point cloud collected by the laser radar during the traveling process of the unmanned equipment;
[0136] A suspected obstacle determination module 402, configured to determine a suspected obstacle on the travel path of the unmanned equipment based on the point cloud;
[0137] A target point cloud acquisition module 403, configured to control the lidar to scan the area where the suspected obstacle is located at at least two different angles to obtain at least two frames of target point clouds;
[0138] a point cloud fusion module 404, configured to fuse the target point clouds of the at least two frames to obtain a dense point cloud;
[0139] A real obstacle determination module 405, configured to det...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More