

Anti-swing sliding mode control method for movable base bridge crane based on Hurwitz stability
A technology of bridge crane and control method, which is applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve the problems of difficult setting and many sliding mode controller parameters, and achieve good function, load elimination and The energy consumption and robustness of the controller are good, and the effect of providing the realizability of the control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
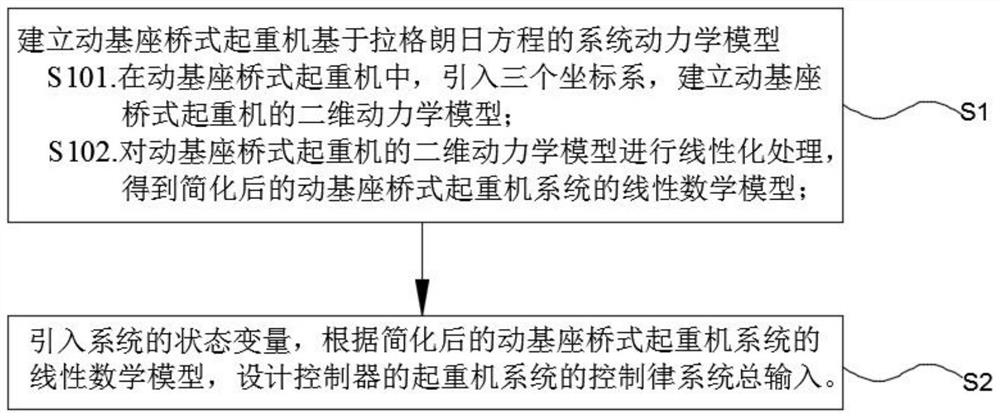
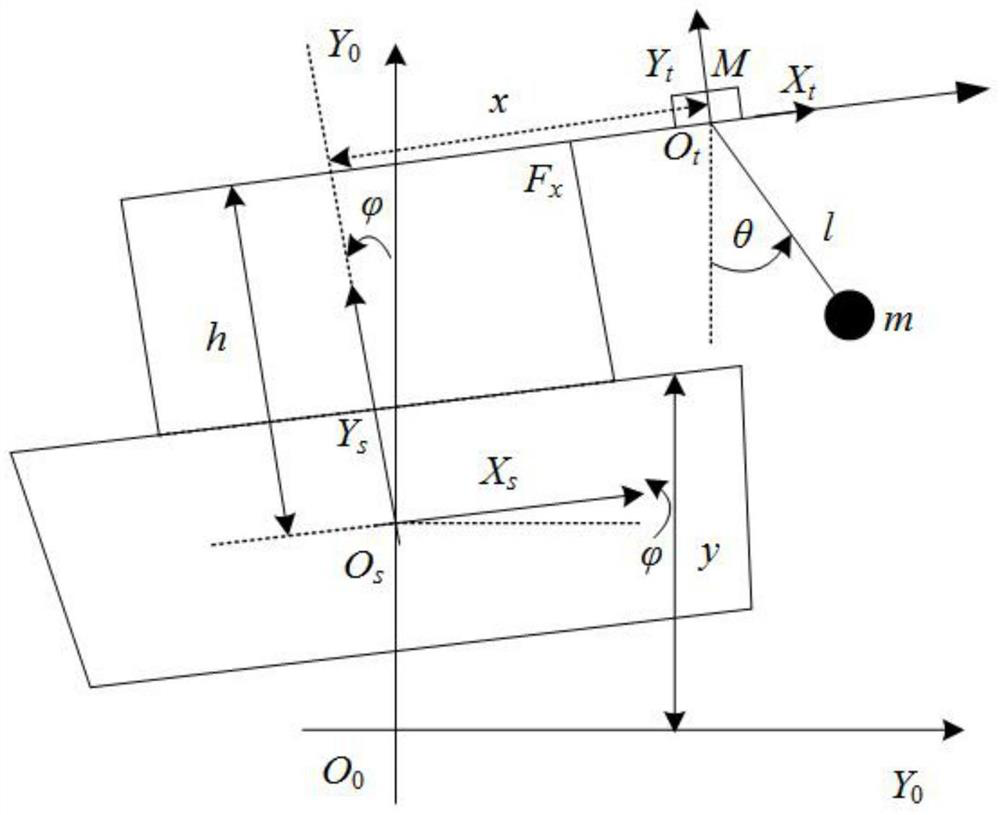
[0156] Example 1: To verify the feasibility of the above-described anti-swing slip mode control method of the moving base bridge crane based on Hurwitz stability, the stability verification of the above method:
[0157] Theorem 1: Take ε> L, L = (1 + c 2 D represents the upper bound of the interference, then the control law of the crane system (23) can make the slip die surfaces shown in equation (17) converge to zero in a limited time;
[0158] Proof: Define the Lyapunov function as:
[0159]
[0160] Obviously, the V function is positively definite and can be derived by deriving it:
[0161]
[0162] When ε> L, the control law is substituted Medium, available
[0163]
[0164] Available by formula (26) and formula (24).
[0165]
[0166] From Equation (27), it can be seen that both the Lyapunov function V(t) and the sliding mode surface of the system s(t) are bounded, i.e. s,V∈L ∞ ;
[0167] Therefore, from the Lyapunov stability theory in equation (16), it can be seen th...
Embodiment 2
[0192] Example 2: Simulation results and analysis
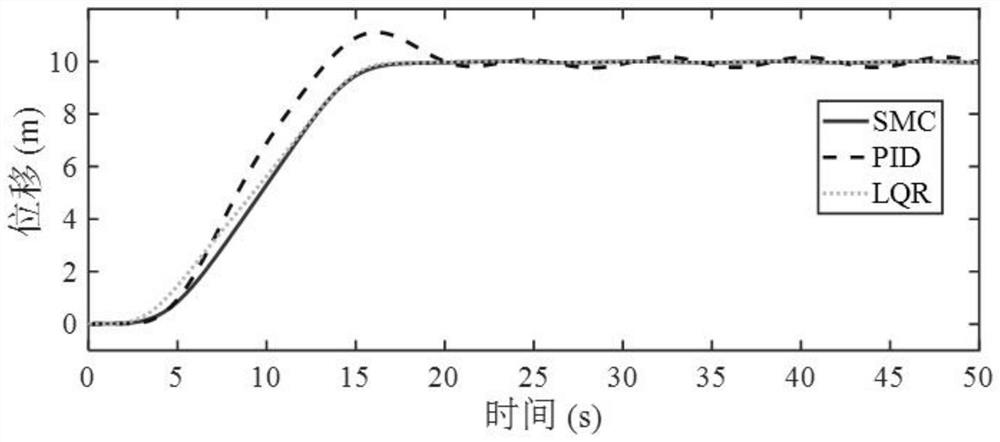
[0193] 1. Controller comparative analysis
[0194] In order to test the positioning and slewing effect of the proposed sliding mode control, matlab / Simulink simulation experiment is designed, and the sampling time is 0.05s, and the control effect of the proposed sliding mode controller is compared with the traditional PID and LQR. The S-type function based on the sigmoid function is used to plan the trajectory of the trolley movement; Sets the maximum acceleration of the trolley A max =0.2m / s 2 , the trolley is rated speed V max =1m / s, the tracking distance is 10m; In the simulation, the system parameters are set to: M=20kg, m=4kg, and g=9.81m / s 2 , l=0.7m, h=2.5m; its initial state is set to x(0)=0, θ(0)=0, The rocking angle of the base movement in harsh sea conditions is φ = 0.01sin(0.8t)rad;
[0195] Sliding mode controller such as equation (23), because the switching function sgn(s) is easy to switch frequently when the sta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More