

Underwater vehicle vertical plane navigation attitude optimization control method
An optimized control and submersible technology, applied in attitude control, three-dimensional position/channel control and other directions, can solve problems such as high requirements for submersible parameters, device control and sensor accuracy, inability to achieve attitude adjustment, insufficient adaptability, etc. Reliable performance, simple design, and good scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
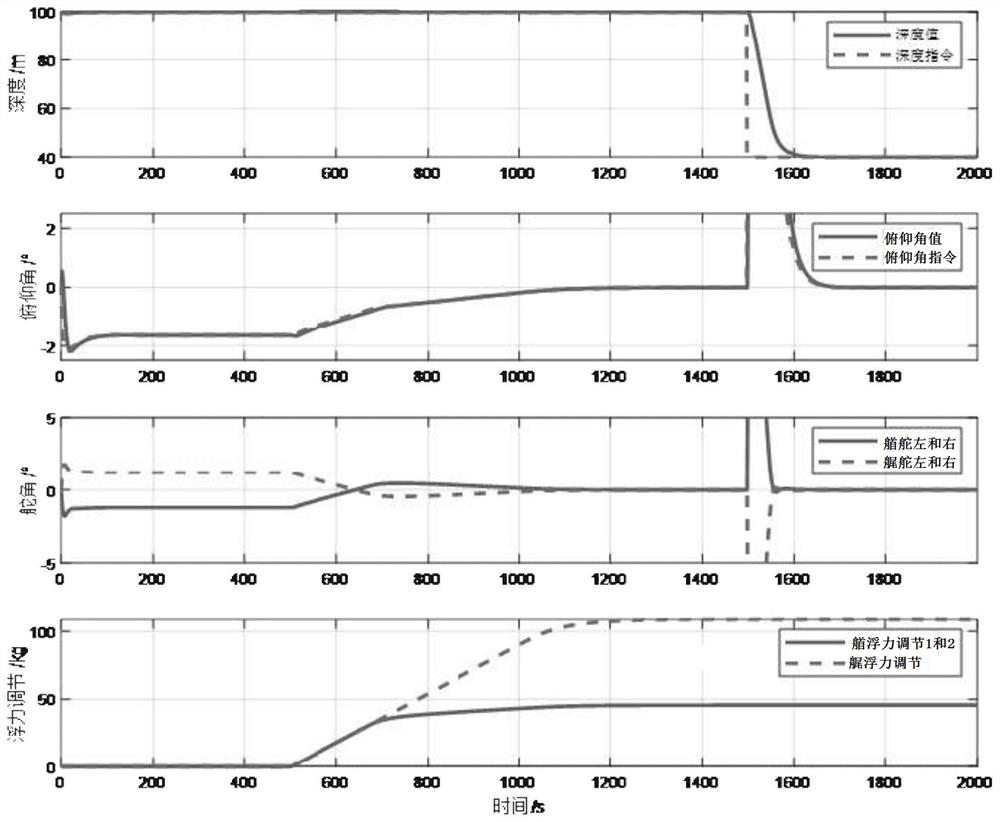
[0023] The method described in the above technical solution is described below with a simulation example:
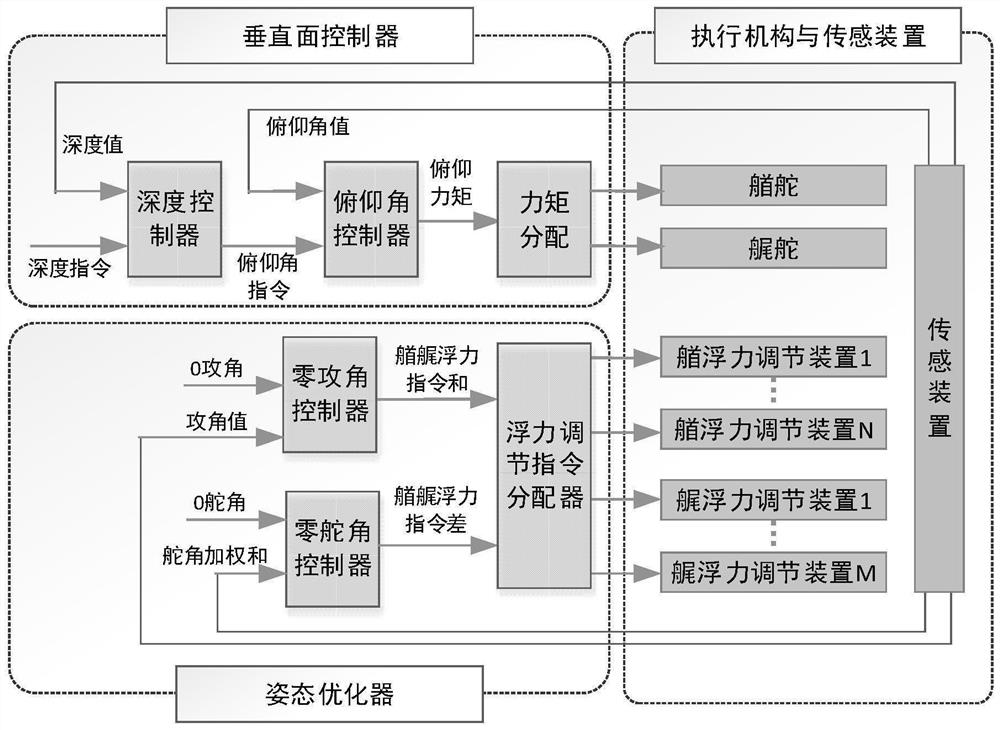
[0024] 1. A method for optimizing the navigation attitude of a submersible in the vertical plane. The characteristics of the angle of attack and the rudder angle are affected, and the optimal control algorithm is used to realize the navigation control of zero angle of attack and zero rudder angle; specifically, the net buoyancy can be changed by adjusting the sum of the masses of the buoyancy adjustment devices at the bow and stern, and the net buoyancy is In the vertical direction, in order to balance the change of the force in the vertical direction, the propeller needs to generate a component force in the vertical direction, that is, the angle of attack of the submersible needs to be adjusted. Change the buoyancy moment of the submersible, and then affect the balance pitch moment, and then affect the change of the rudder angle;
[0025] 2. Based on the above principl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More