

Mobile robot chemical experiment operation system and method
A mobile robot and chemical experiment technology, applied in the field of mobile robot chemical experiment operating system, can solve the problems of high economic cost, weak flexibility and scalability, slow positioning speed, etc., achieve good stability and safety, and save positioning space , The effect of fast positioning speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
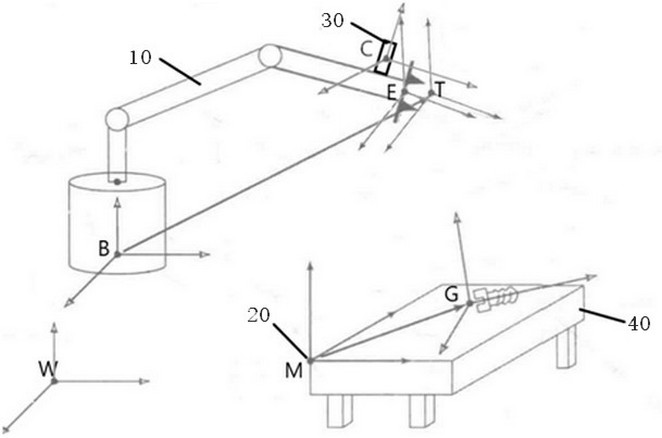
[0113] like figure 1 As shown, this embodiment provides a mobile robot chemical experiment operating system, which is used in a chemical experiment scene containing one or more chemical work stations. Each chemical work station 40 is provided with chemical instruments and operators for chemical experiments. include:
[0114] As a multi-degree-of-freedom operating arm of the mobile robot 10 (hereinafter referred to as the operating arm for convenience of description), the bottom of the multi-degree-of-freedom operating arm is provided with a mobile chassis, that is, a base;
[0115] a camera 20, arranged on the operating arm;
[0116] A plurality of positioning labels 30, one positioning label is set on each chemical work site;
[0117] The manipulator, whose control system is connected to the camera in communication, can control the manipulator to perform chemical experiment operations according to the color map and depth map including the positioning label collected by the ...
Embodiment 2
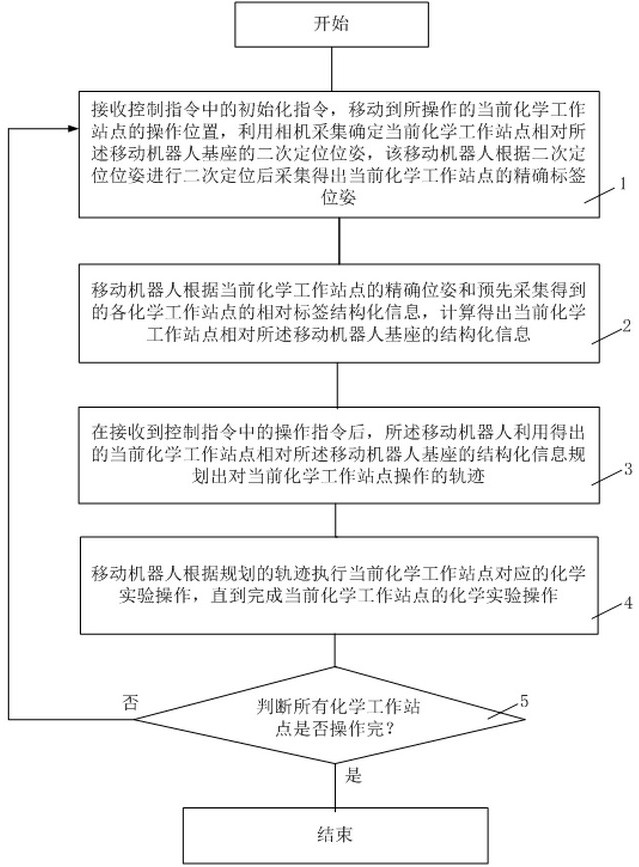
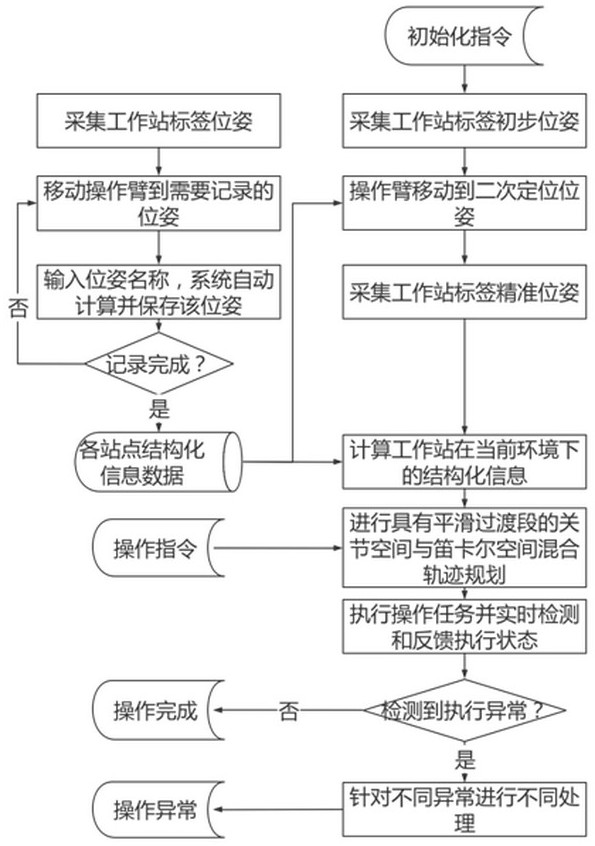
[0134] see figure 2 , 3 , the process of carrying out the chemical experiment operation by the mechanical arm of the above-mentioned embodiment 1 system is as follows:
[0135] Step 1, after receiving the initialization instruction in the control instruction, the robotic arm moves to the operating position of the current chemical work station being operated, and uses the camera set on the robotic arm to collect and determine the relative relationship between the current chemical work site and the base of the robotic arm. The secondary positioning pose of the robotic arm is obtained after the secondary positioning is performed according to the secondary positioning pose to obtain the precise label pose of the current chemical work site;
[0136] Step 2, the robotic arm calculates the structural information of the current chemical work site relative to the base of the robotic arm according to the precise pose of the current chemical work site and the pre-collected relative lab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More