

Compact variable stiffness joint module with flexible element
A technology of flexible components and variable stiffness, which is applied in the field of robots, can solve the problems of not having variable stiffness, universality, and complicated control methods, etc., and achieves the effect of simple installation, smooth and accurate rotation, and preventing shaking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described in detail below with reference to the accompanying drawings.
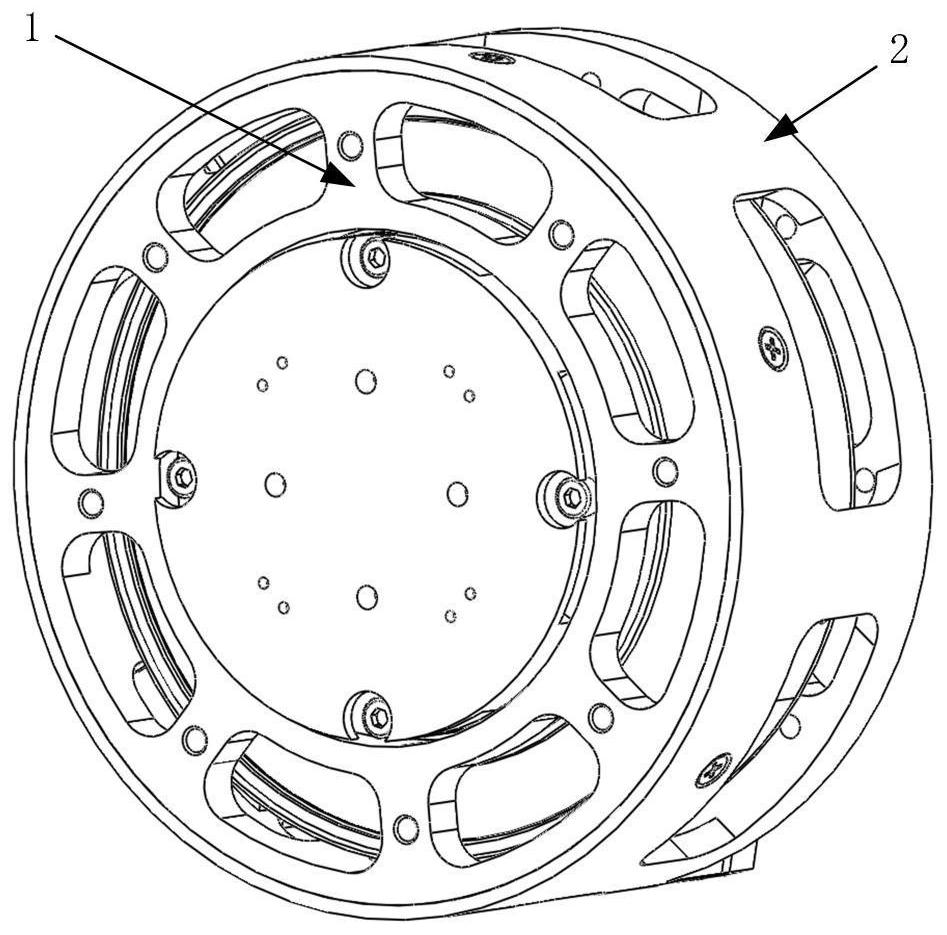
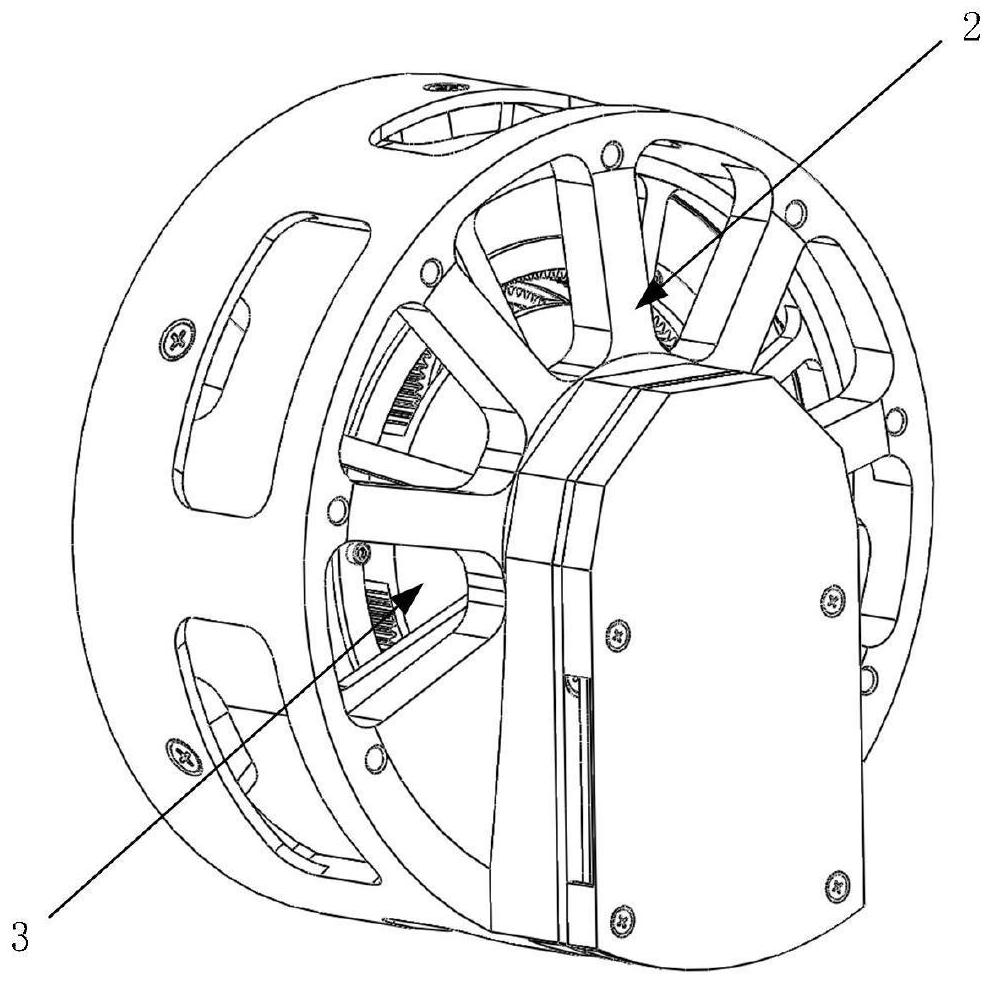
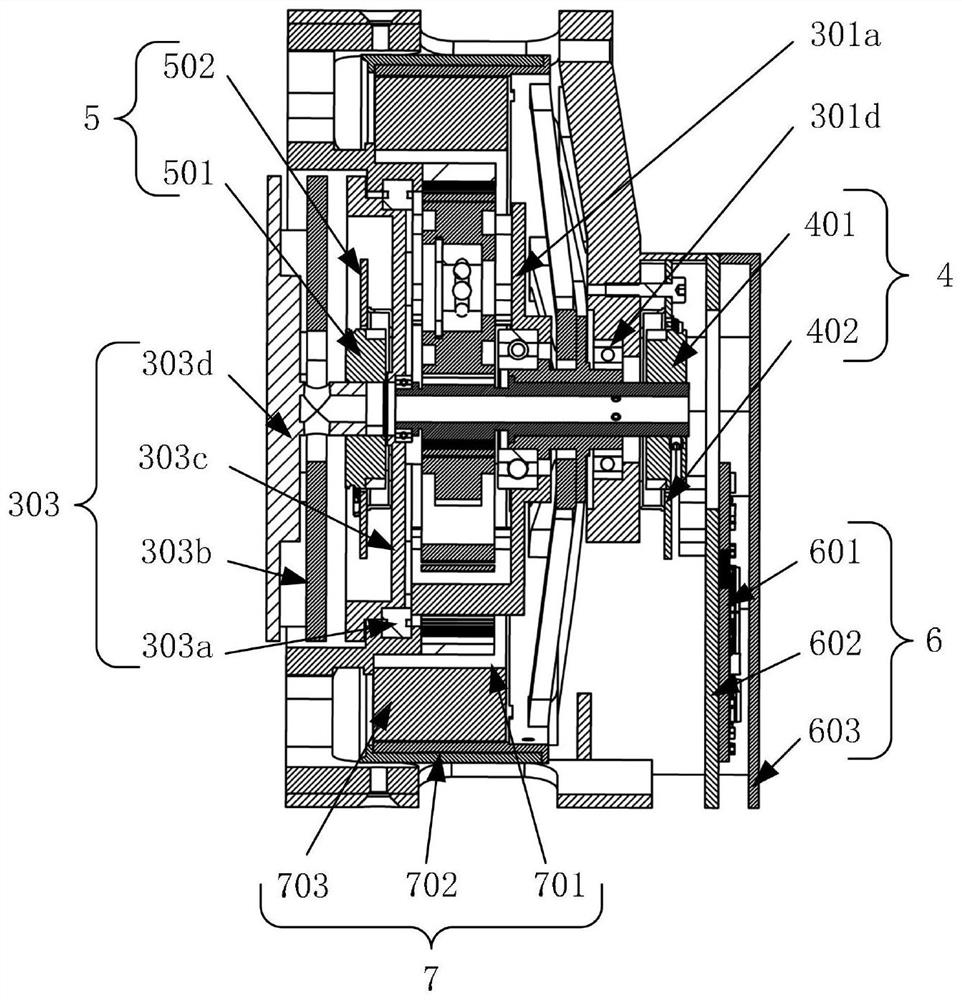
[0047] The present invention has a compact variable stiffness joint module with flexible elements, such as Figure 1 to Figure 5As shown, it includes a front end casing 1, a rear end casing 2, a variable stiffness mechanism 3, a motor end magnetic encoder 4, an output end magnetic encoder 5, a drive unit 6 and a frameless torque motor unit 7. The variable stiffness mechanism 3 further includes a planetary gear reducer 301 , a motor end bearing 302 and a flexible link unit 303 .
[0048] like figure 1 , figure 2 As shown, the front end housing 1 is a circular plate-shaped structure, and the outer circumferential side wall of the outer ring matches the inner diameter of the rear end housing 2 of the cylindrical structure. The front-end housing 1 is embedded in the rear-end housing 2, located at the front end of the rear-end housing 2, and the side wall is flu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More