

Active fault-tolerant control method for nonlinear electromechanical system
An electromechanical system, fault-tolerant control technology, applied in the direction of comprehensive factory control, electrical digital data processing, computer-aided design, etc., can solve problems such as system catastrophe, and achieve the effect of simple use, strong robustness, and fast response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0117] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
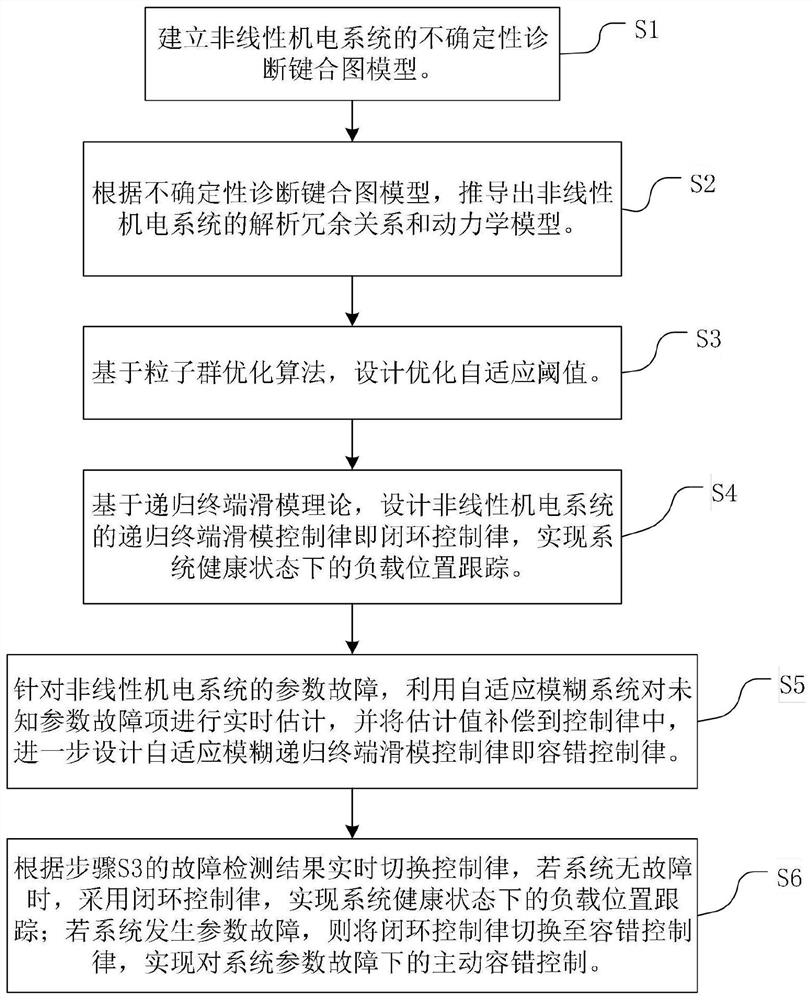
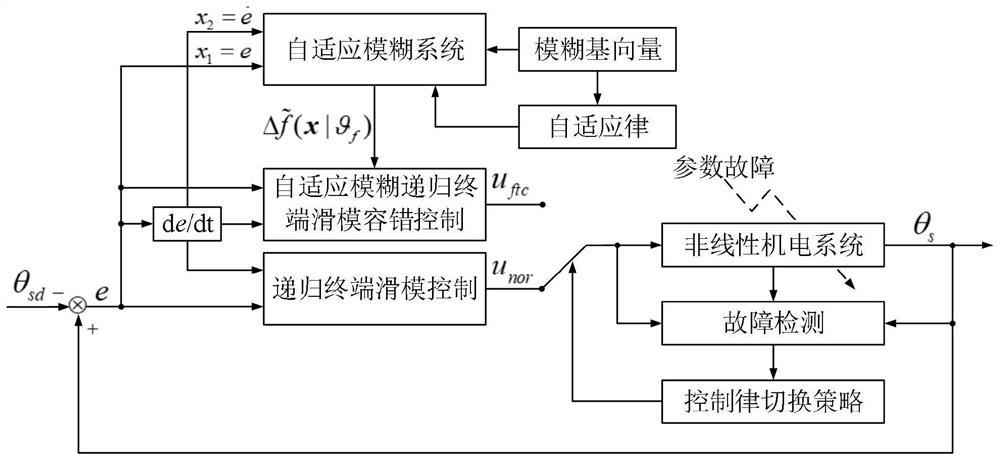
[0118] Depend on figure 1 As shown, an active fault-tolerant control method for a nonlinear electromechanical system includes the following steps:
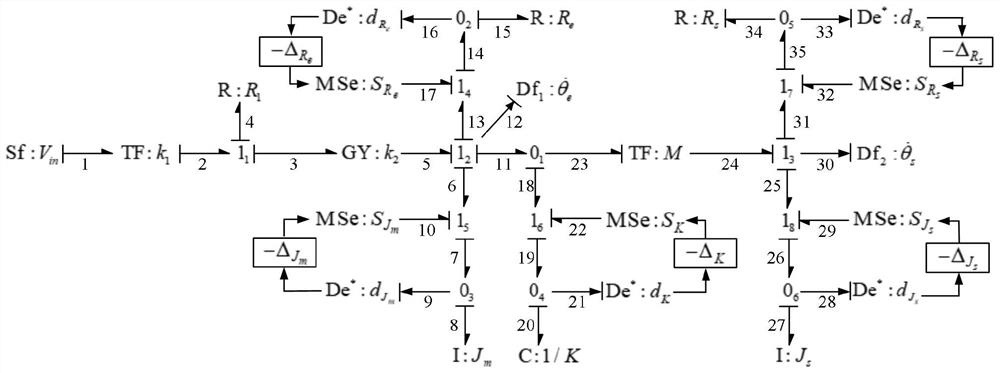
[0119] S1, establish a bond graph model for uncertainty diagnosis of nonlinear electromechanical systems;
[0120] S2, derive the analytical redundancy relationship of the nonlinear electromechanical system according to the bond graph model of the uncertainty diagnosis, analyze the nomin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More