

Micro surgery operation robot control system with force sense
A surgical robot and microsurgery technology, which is applied in the field of control systems, can solve the problems of poor openness and versatility, and the robot control system cannot meet the requirements, so as to improve safety and success rate, facilitate rest, and reduce fatigue.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
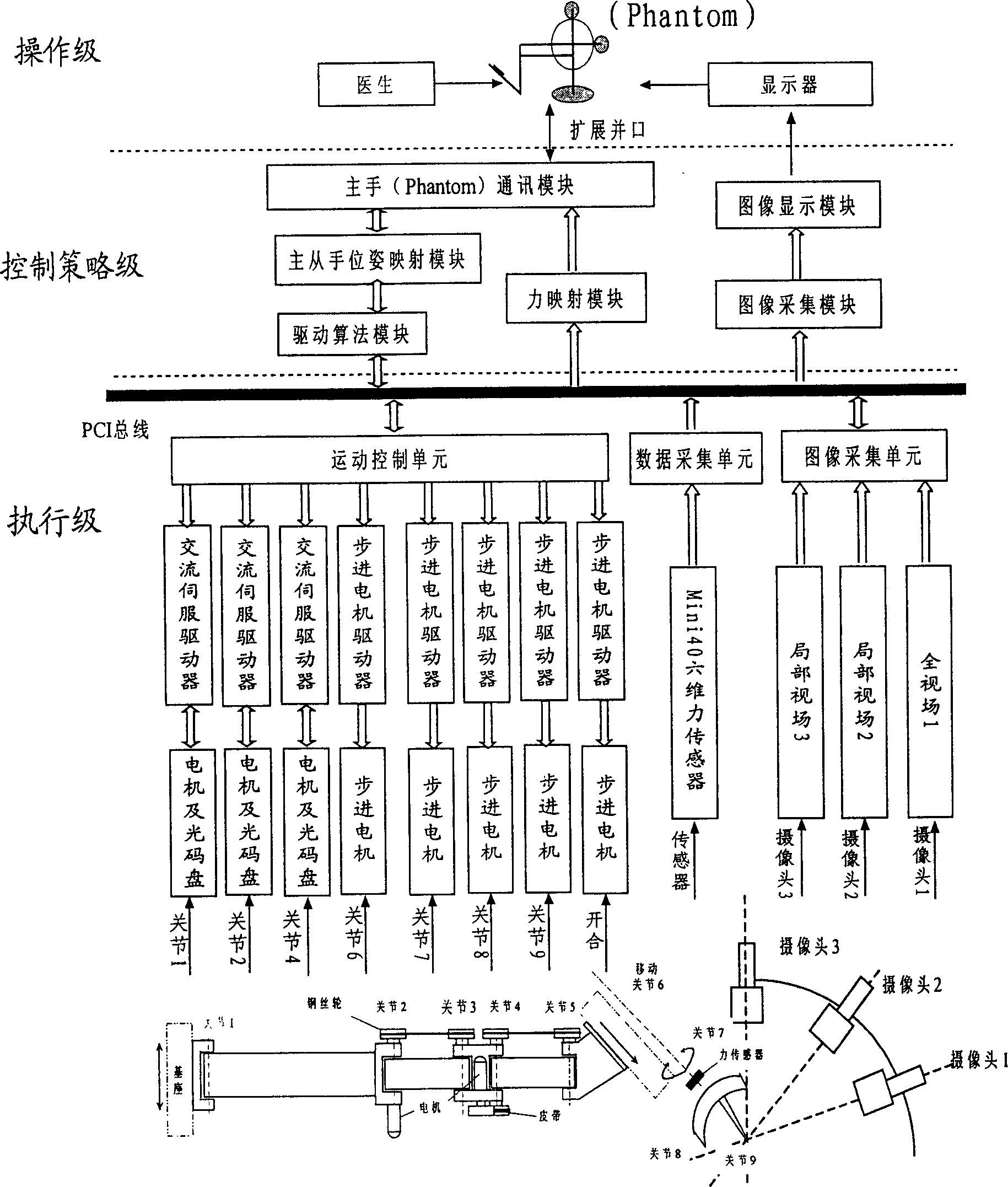
[0021] The control system of MicroHand robot is an open system based on PC. This system makes full use of the rich software resources of Windows and various communication interfaces of PC. It has the characteristics of strong portability and flexibility. Such as figure 1 It is the overall structural block diagram of the control system of the present invention
[0022] The control system of the present invention includes three levels, namely operation level, control strategy level and execution level. The operation level is the top layer of the control system, which is composed of the upper management system computer (high-performance PC) and the main operating system (Phantom), responsible for the monitoring and management of system information, image display of the working area, and recording of doctor operation information, etc. ; The control strategy level mainly includes the master-slave hand pose mapping module, the driving algorithm module and the master-hand communicat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More