Multifeet walking robot and its control device
A walking robot and robot technology, applied in the field of robots, can solve the problems of inability to control independently, no impact resistance, lack of flexibility, etc., and achieve the effects of easy coordination and division of labor, good mobility, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
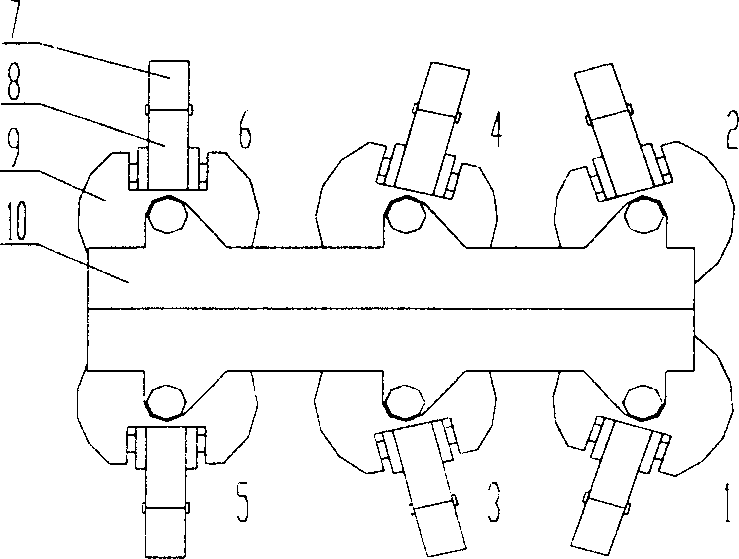
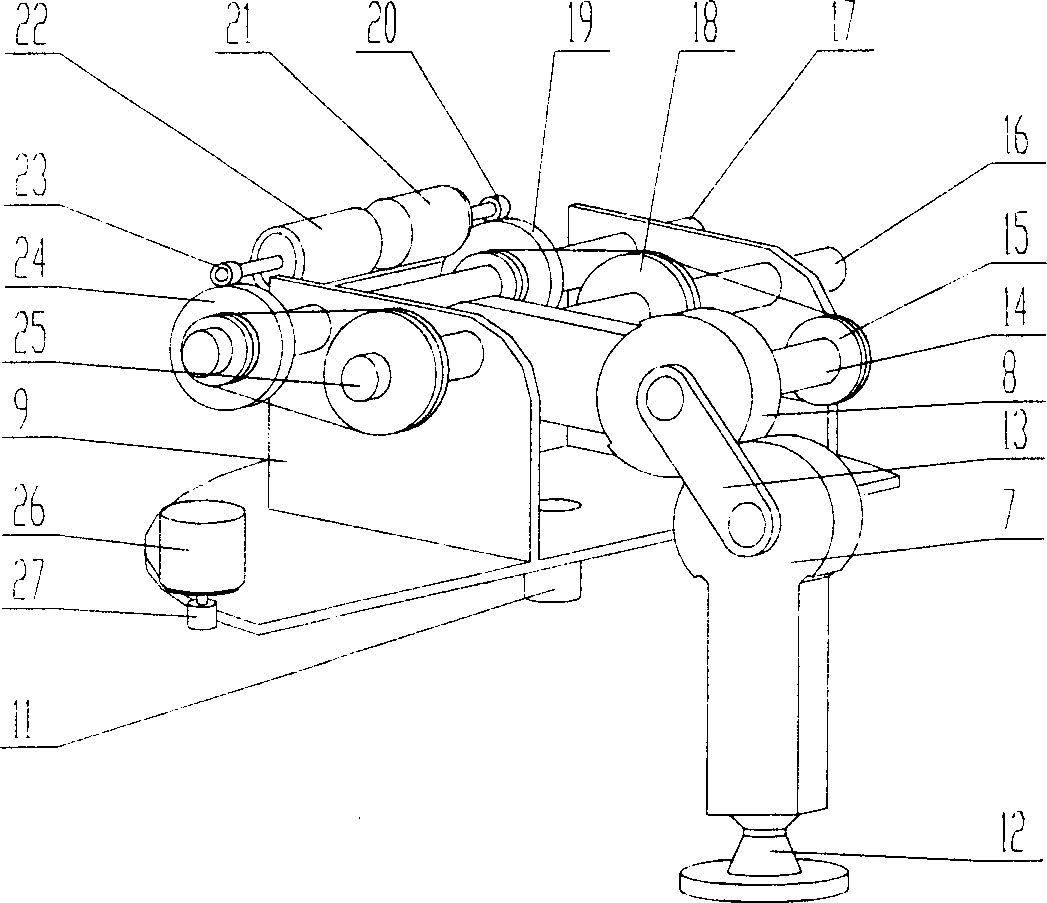
[0016] like figure 1 As shown, the robot consists of a frame 10, two front feet 5, 6, two middle feet 3, 4 and two rear feet 1, 2. The six legs are divided into left and right rows and distributed side by side. Each of the feet is composed of a lower leg 7, a thigh 8, a hip 9 and a drive and transmission device. Each foot is connected to the frame 10 through a pivot 11 at the center of its hip. Every foot has figure 2 A set of mechanical transmissions shown.
[0017] One of the specific implementations of each foot of the robot is as follows: figure 2 As shown, any foot of the robot consists of a foot 12, a lower leg 7, a connecting rod 13, a thigh 8, a lower leg joint transmission shaft 14, a first wire wheel 18, a thigh joint transmission shaft 16, a first transmission shaft 17, a second wire wheel 15, First pulley gear 19, first pinion 20, calf servo motor 21, thigh servo motor 22, second pinion 23, second pulley gear 24, third pulley 25, hip 9, hip servo The motor ...
Embodiment
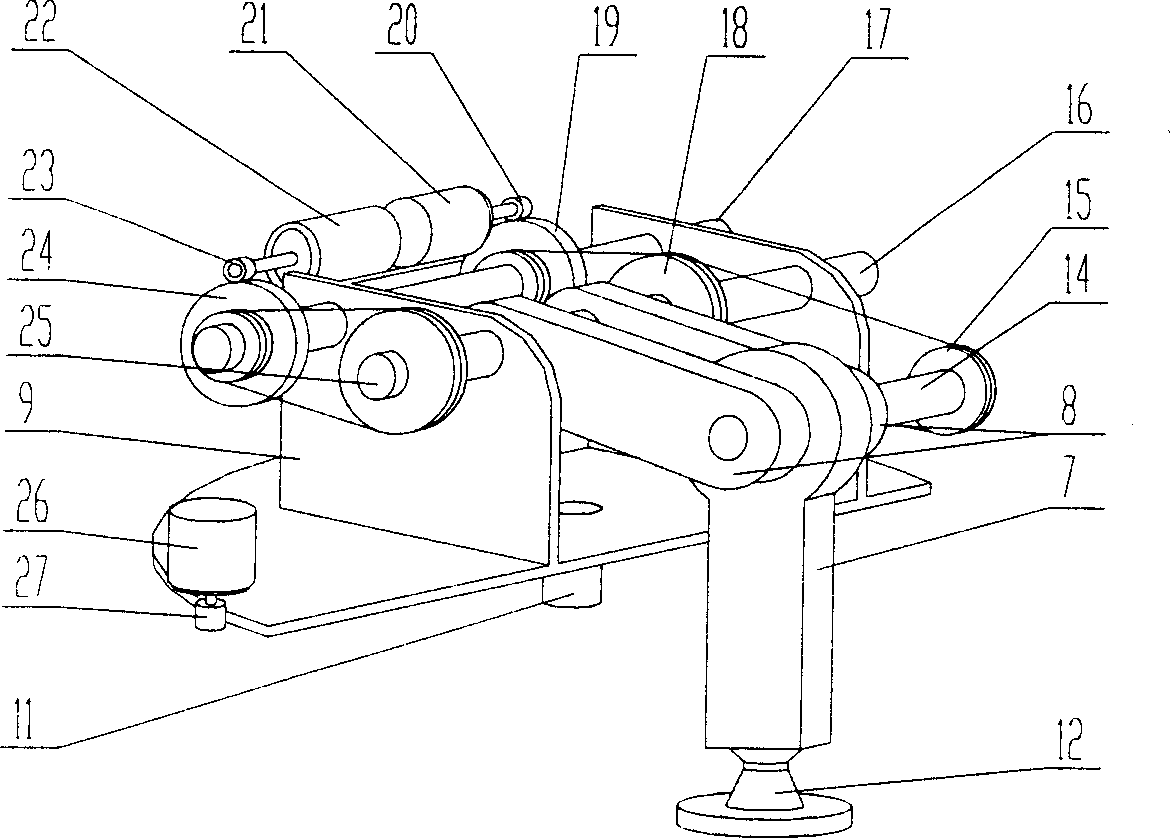
[0024] The overall distribution of the robot hexapods in this embodiment is as follows: figure 1 As shown, the structural principle of one of the feet of the robot is as follows image 3 shown. It can be seen from the figure that this embodiment is basically the same as the robot mechanical device and the control method described in the first embodiment. The difference is: in image 3 In the middle, the thigh 8 is composed of two parallel rods that rotate synchronously, and is a type II structure. At the connection between the thigh 8 and the lower leg 7, the lower leg 7 is driven by the second wire wheel 15, and directly rotates around the lower leg joint drive shaft 14.
[0025] The control device is the same as that of the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com