Intelligent mechatronic control suspension system based on quantum soft computing
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A control system and suspension system technology, applied in the field of control systems, can solve problems such as poor control quality and difficulty in generating training signal approximations
Inactive Publication Date: 2005-09-21
YAMAHA MOTOR CO LTD
View PDF1 Cites 32 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0007] When a genetic analyzer is used to generate a training signal in a fuzzy neural network, the training signal typically includes unnecessary random noise, making it difficult to generate an approximation of the training signal later, and when it will be used in an operating condition (such as a different road conditions) training signals may lead to poor control quality when used in different environments (e.g. in different types of road conditions)
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
example 1
[0165] Example 1: Assume that X(t) is uniformly distributed, ie
[0166] p ( x ) = 1 2 Δ , - Δ ≤ x ≤ Δ - - - ( 2.10 )
[0167] Substitute (2.10) into (2.8)
[0168] D. 2 (x)=α(Δ 2 -x 2 ) (2.11)
[0169] In this case, given the desired Ito equation
[0170] dX = αXdt + α ( Δ 2 - X 2 ) dB ( t ) - - - ( 2.12 )
[0171]Interestingly, ...
example 2
[0174] Example 2: Make X(t) Rayleigh distributed
[0175] p(x)=γ 2 xexp(-γx), γ>0, 0≤x<∞ (2.14)
[0176] Its concentrated form Y(t)=X(t)-2 / γ has a probability density:
[0177] p(y)=γ(γy+2)exp(-γy+2), -2 / γ≤y<∞ (2.15)
[0178] From equation (2.8)
[0179] D 2 ( y ) = 2 α γ ( y + 2 γ ) - - - ( 2.16 )
[0180] The lto equation for Y(t) is
[0181] dY = - αYdt + [ 2 α γ ( Y + 2 γ ...
example 3
[0185] Example 3: Consider a family of probability densities that obey the following equation:
[0186] d dx p ( x ) = J ( x ) p ( x ) - - - ( 2.19 )
[0187] After integrating equation (2.19), we get
[0188] p(x)=C 1 exp(∫J(x)dx) (2.20)
[0189] where C 1 is the standardized constant, in this case
[0190] D. 2 (x)=-2αexp[-J(x)]∫xexp[J(x)]dx (2.21)
[0191] A number of special circumstances should be noted, so that
[0192] J(x)=-γx 2 -δx 4 , -∞
[0193] where γ is arbitrary if δ>0, and substituting equation (2.22) into equation (2.8) gives
[0194] D 2 ( x ) = ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
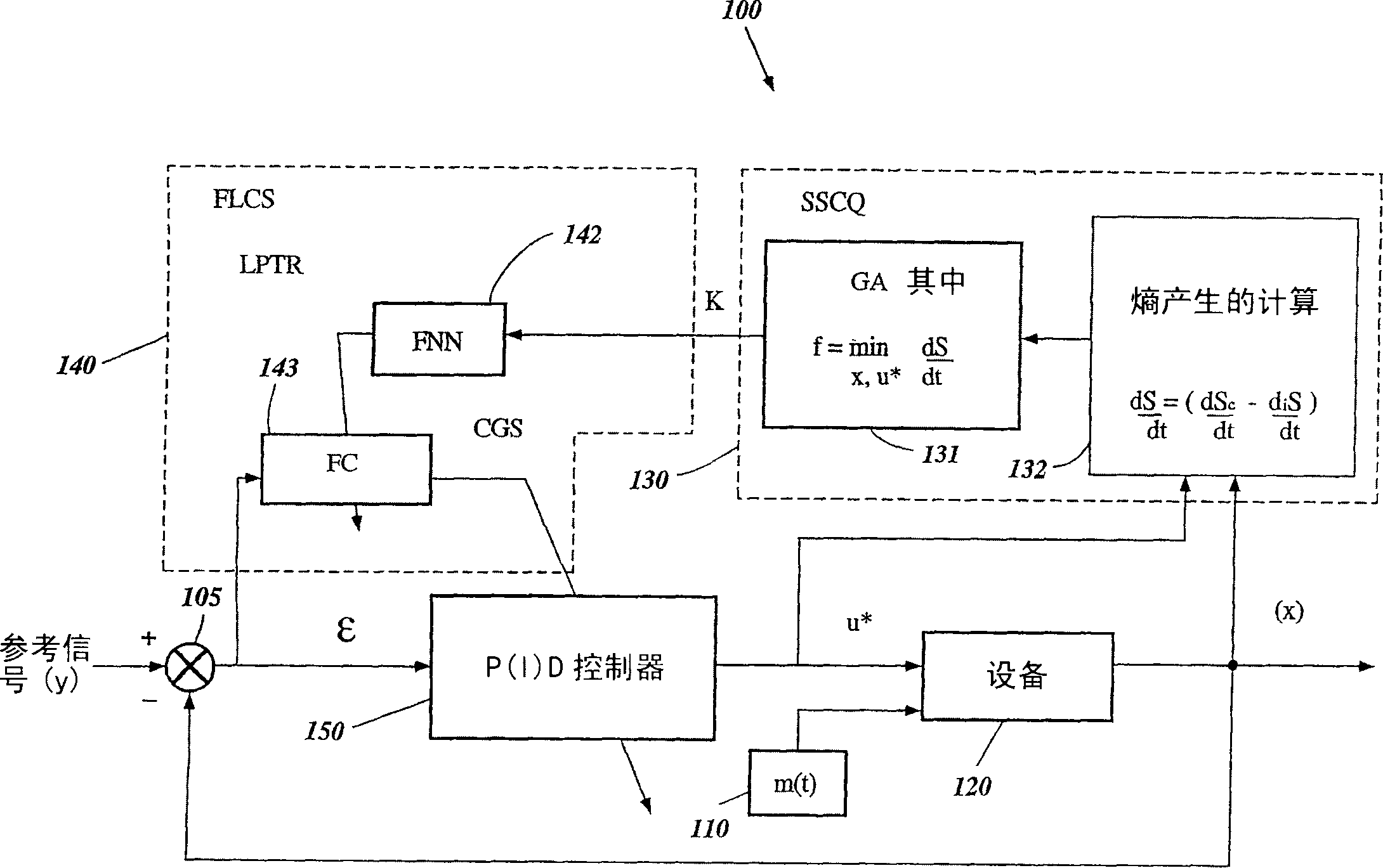
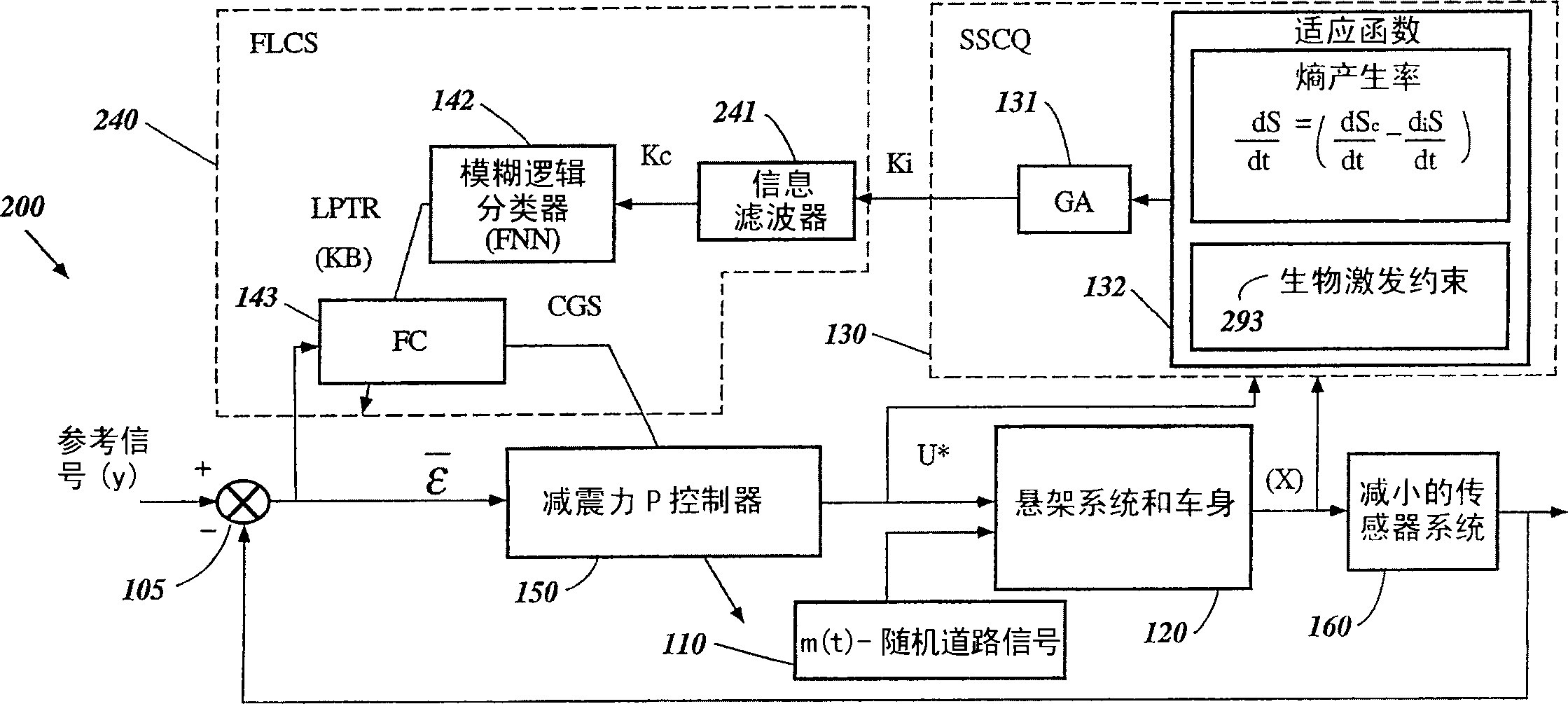
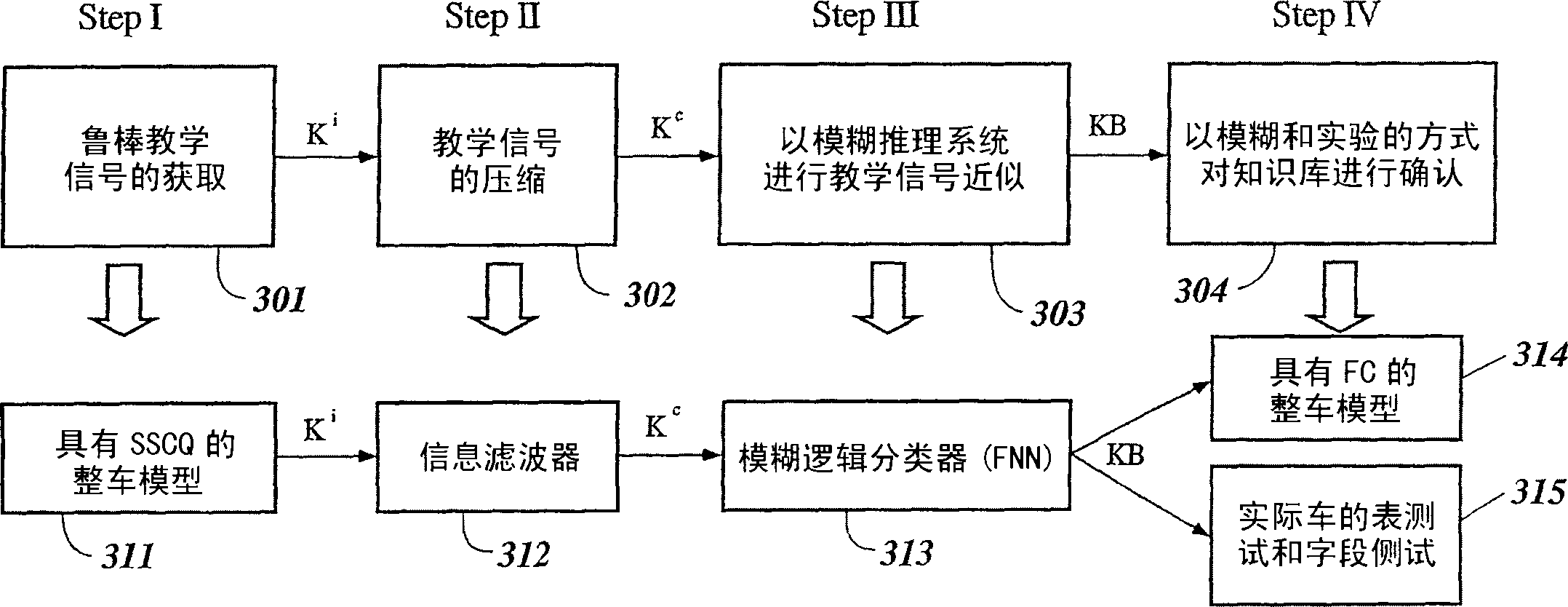
A control system for optimizing a shock absorber having a non-linear kinetic characteristic is described. The control system uses a fitness (performance) function that is based on the physical laws of minimum entropy and biologically inspired constraints relating to mechanical constraints and / or rider comfort, driveability, etc. In one embodiment, a genetic analyzer is used in an off-line mode to develop a teaching signal. The teaching signal can be approximated online by a fuzzy controller that operates using knowledge from a knowledge base. A learning system is used to create the knowledge base for use by the online fuzzy controller. In one embodiment, the learning system uses a quantumsearch algorithm to search a number of solution spaces to obtain information for the knowledge base. The online fuzzy controller is used to program a linear controller.
Description
technical field [0001] The present invention relates generally to control systems, and more particularly to electronically controlled suspension systems. Background technique [0002] Feedback control systems are widely used to keep the output value of a dynamic system at a desired value despite external disturbances that make it deviate from the desired value. For example, a domestic space heating fireplace controlled by a thermostat is an example of a feedback control system. The thermostat continuously measures the temperature of the air in the room, and when the temperature drops below the expected minimum temperature, the thermostat turns on the fireplace, and when the room temperature reaches the expected minimum temperature, the thermostat turns off the fireplace. While thermostat-fireplace systems maintain the indoor temperature at a relatively constant value despite external disturbances, such as a drop in outdoor temperature, the same type of feedback control is u...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More