

Air-actuated muscle motion analog control platform device and posture control method
A technology of aerodynamic muscles and motion platforms, which is applied to simulators, simulators, entertainment devices, etc. of space navigation conditions, and can solve the problems of strong nonlinearity and unsuitability of the aerodynamic system due to cavity modeling errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
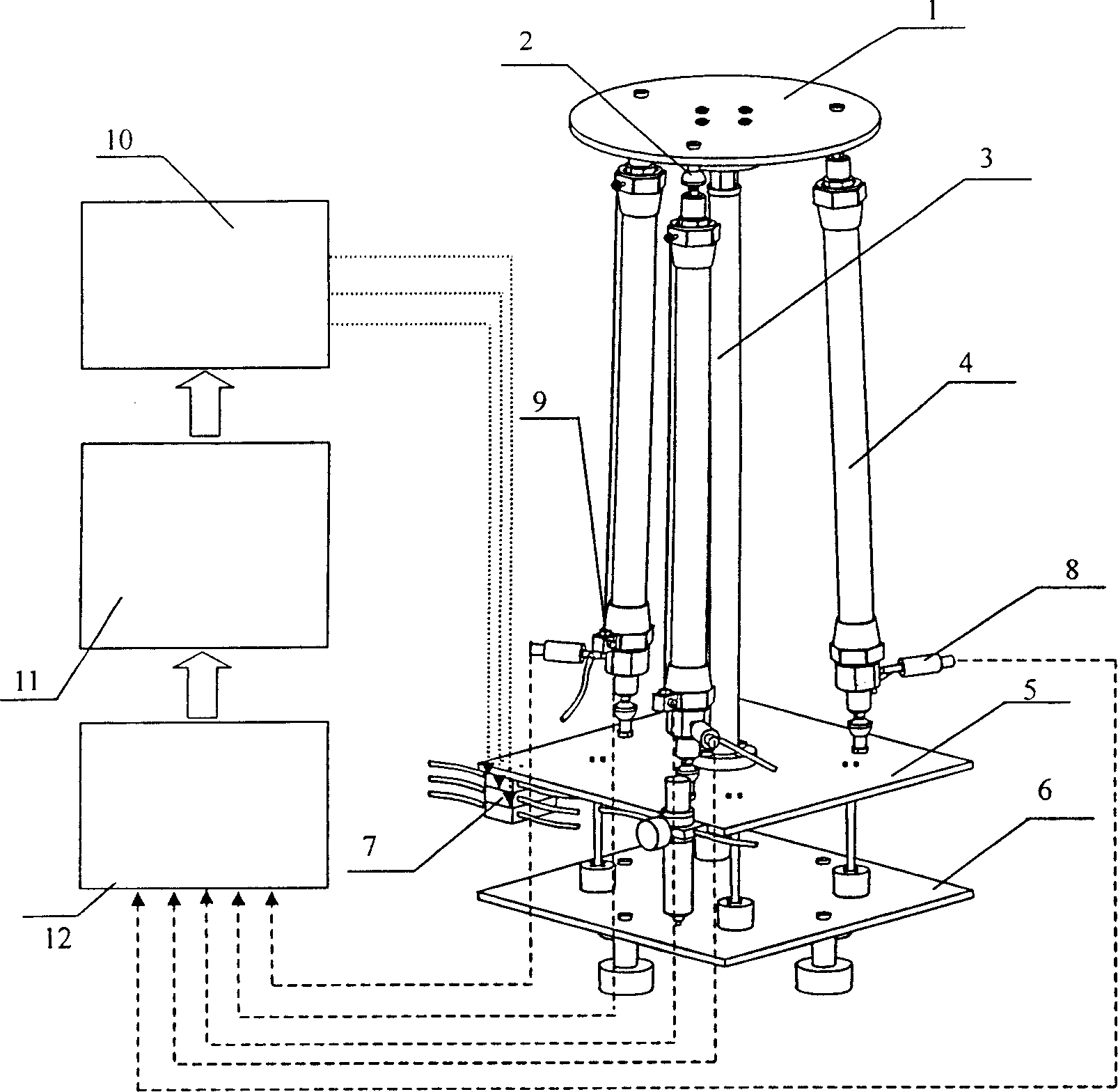
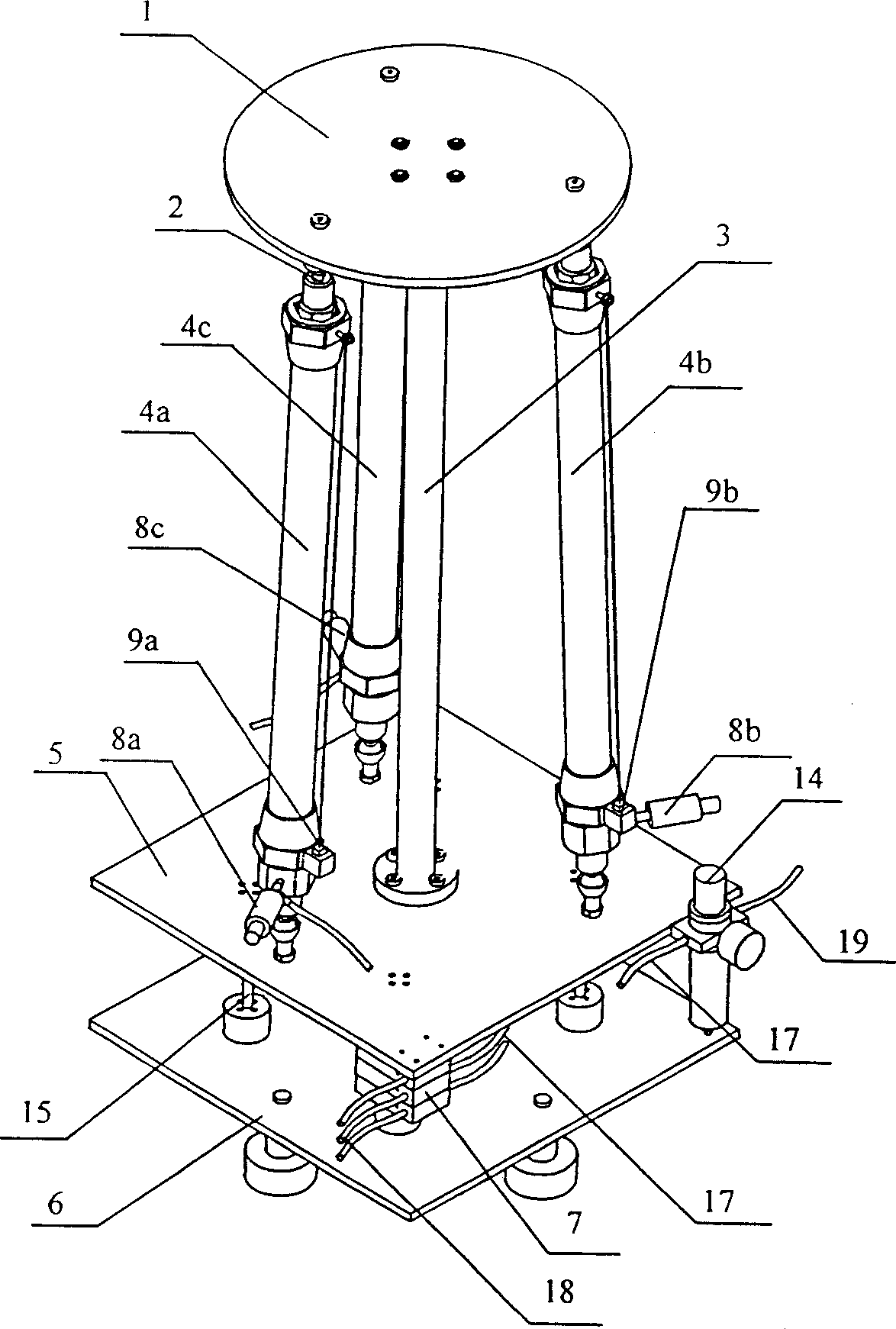
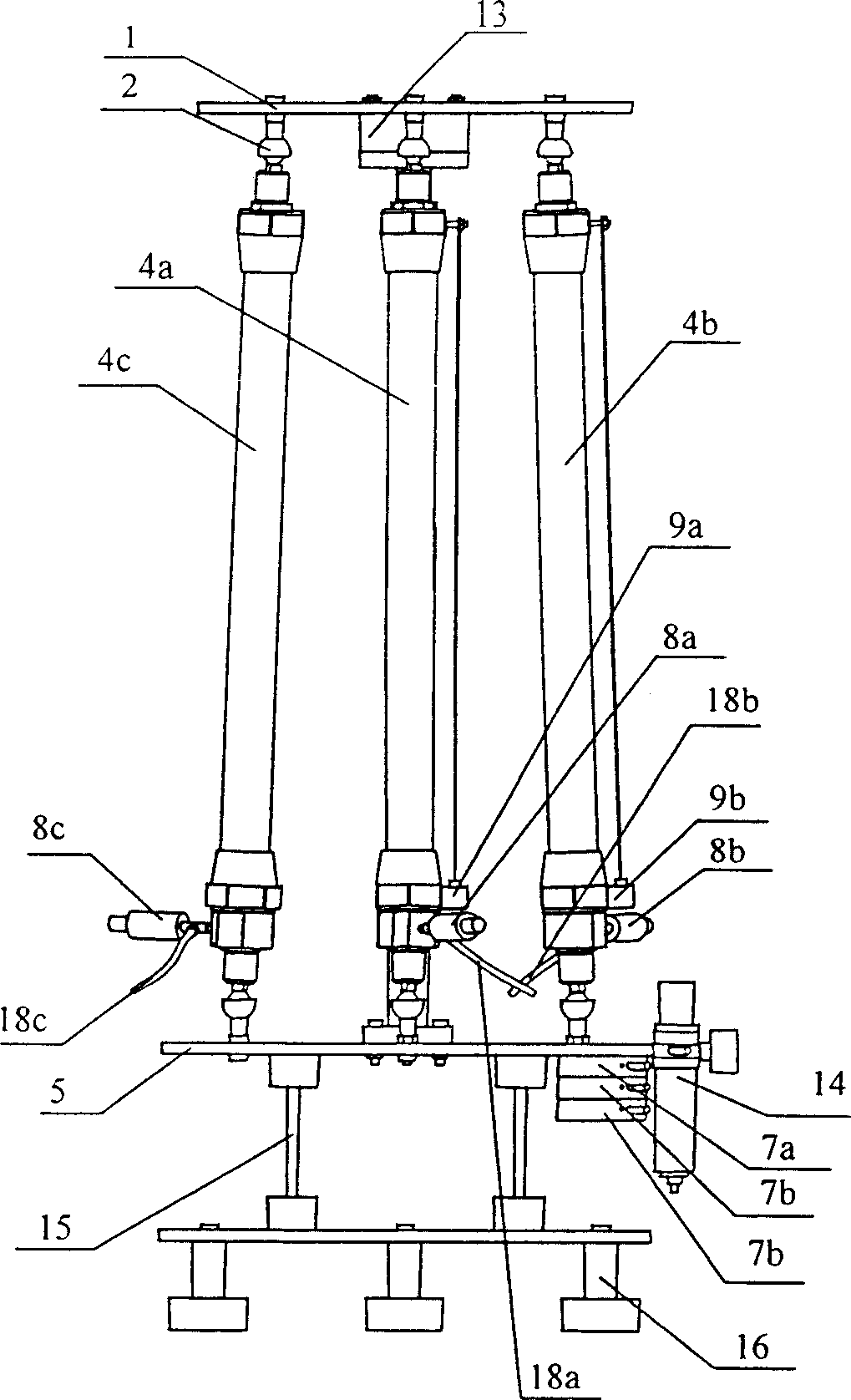
[0048] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 As shown, the pneumatic muscle motion simulation control platform system mainly includes three pneumatic muscles 4, a hinge 2, a central pillar 3, a central spherical hinge 13, a fixed platform 5, a motion platform 1, a base 6, a fixed platform support 15, Base support 16, pneumatic triple piece 14, air source connecting hose 19, air intake hose 18 of pneumatic muscle, air intake hose 17 of pneumatic actuator valve assembly, pneumatic actuator valve assembly 7, displacement sensor 9, pressure sensor 8 , an input conversion module 12 , a controller 11 and an output driver amplification module 10 .
[0049] In the described pneumatic muscle motion simulation control platform device, the motion platform 1 is connected to the fixed platform 5 through three pneumatic muscles 4 and a central pillar 3, and the three pneumatic muscles 4 are connected to the motion platform 1 and the fixed platform 5 with hinges...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More