

Hand-set short-message controled teaching-amusing robot
An entertainment robot and short message technology, applied in the field of robotics, can solve the problems of no teaching and entertainment robots, and not many teaching and entertainment robots, and achieve the effect of expanding flexibility and scope
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
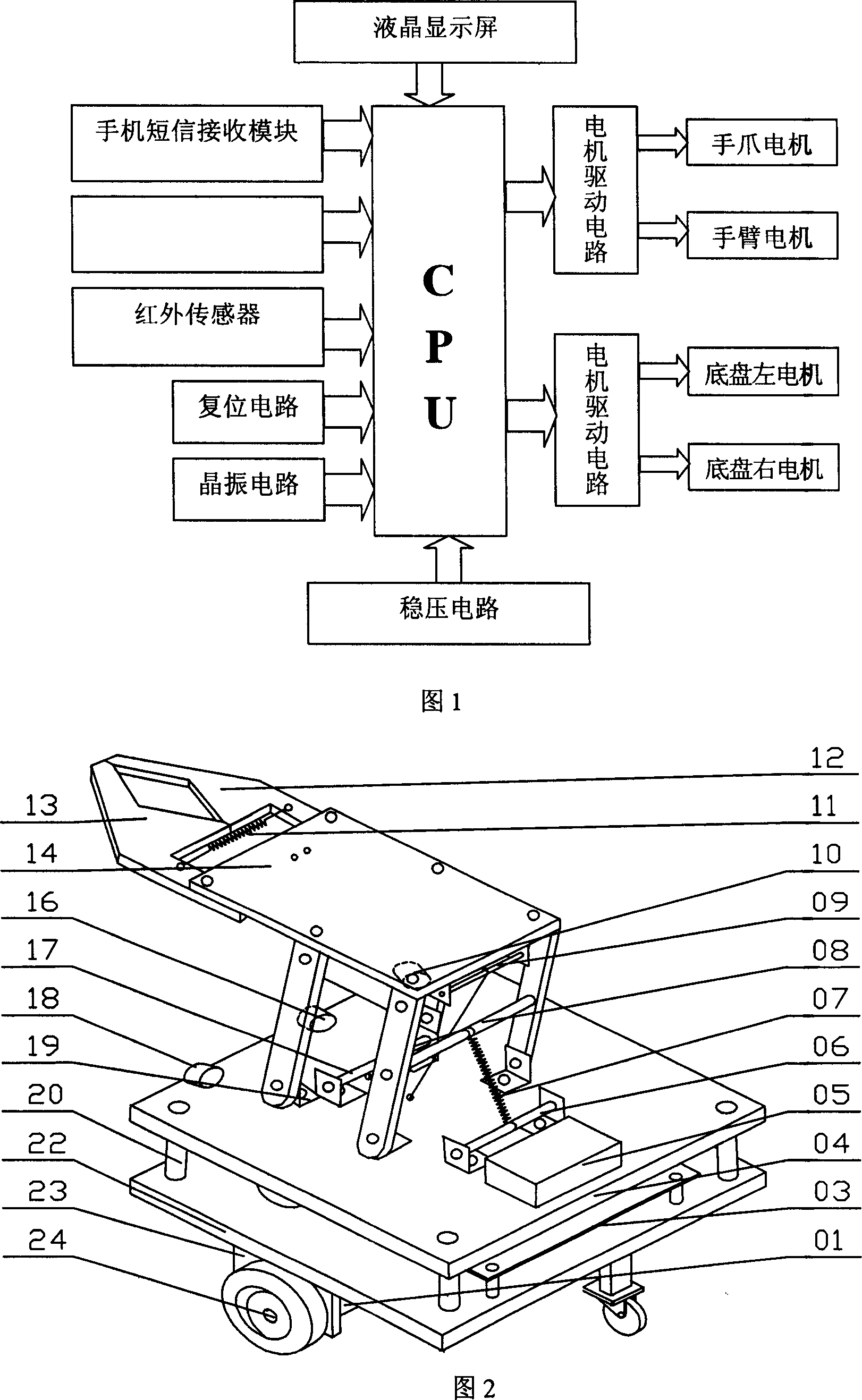
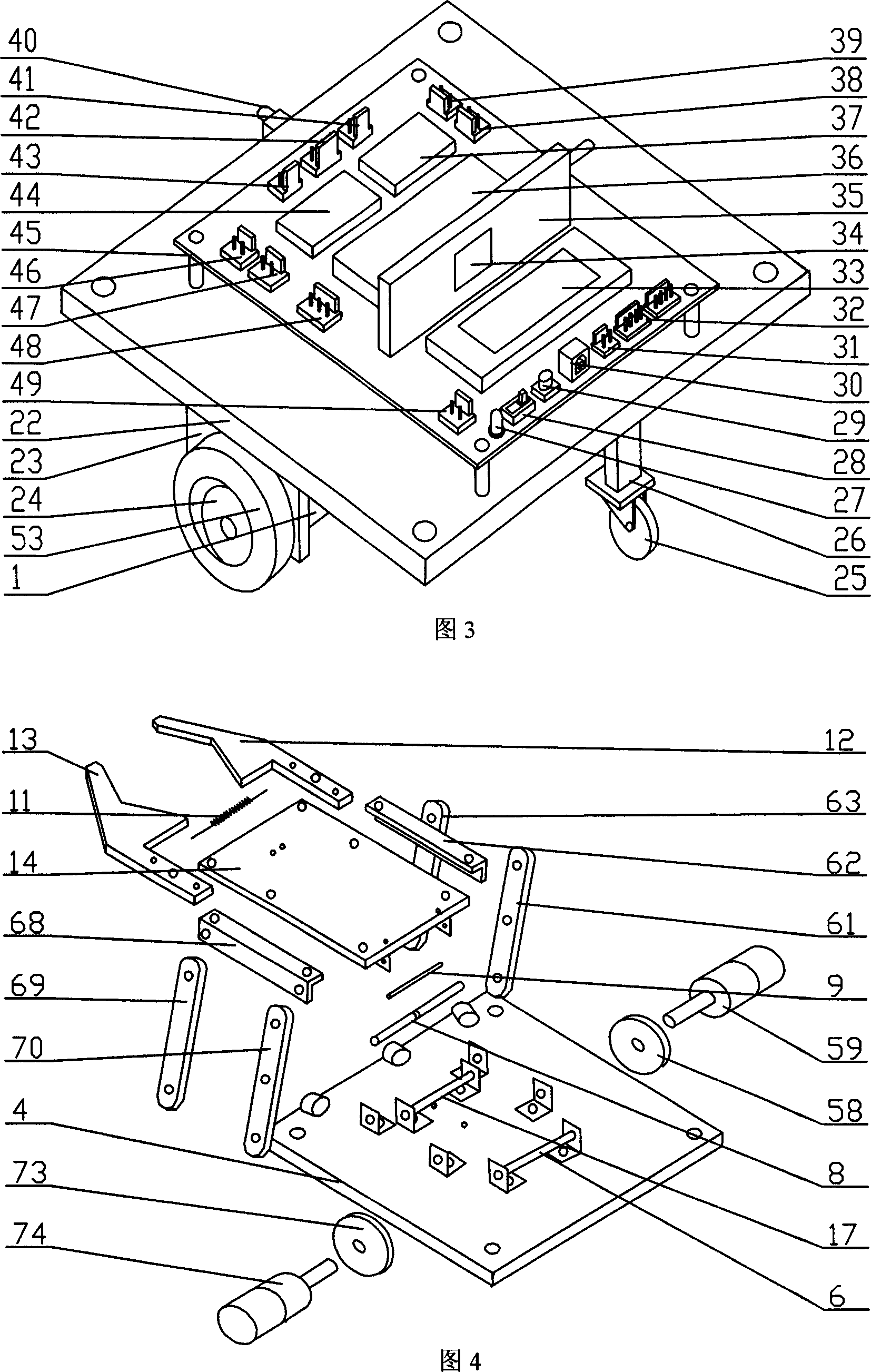
[0031] As shown in Figure 1 and Figure 2, a teaching and entertainment robot controlled by mobile phone text messages includes mechanical and electronic parts. The mechanical part includes a chassis platform 22. The bottom of the chassis platform 22 is equipped with trolley wheels 24 and universal wheel support rods. 26. A universal wheel 25 is installed on the universal wheel support rod 26, the trolley driving motor 1 drives the trolley wheel 24 to rotate, and the chassis platform 22 is equipped with a mechanical arm platform 14 and a left hand claw 13 and a right hand claw 12; The electronic part includes a power interface 31, a crystal oscillator circuit, a reset circuit, a voltage stabilizing circuit, a motor drive circuit, a mobile phone short message module, an infrared sensor, and a collision sensor 40 installed in front of the chassis platform 22 connected to the central processing unit. The command information transmitted by the mobile phone message module and the motor ...
specific Embodiment 2
[0036] The mechanical structure of this embodiment is exactly the same as that of the first embodiment. The electronic part is different in that: the power port 31 and the control signal input port 32 of the main control board are connected to the power port and the signal port on the hand control handle through a flat cable. It constitutes a manual robot. There are eight buttons arranged on the hand control handle, and the buttons correspond to the movement control functions of forward, backward, left turn and right turn of the trolley chassis, the forward and backward arm movement control functions, and the open and close movement control functions of the arm. The robot of this embodiment can also implement manual control on the basis of SMS control.
specific Embodiment 3
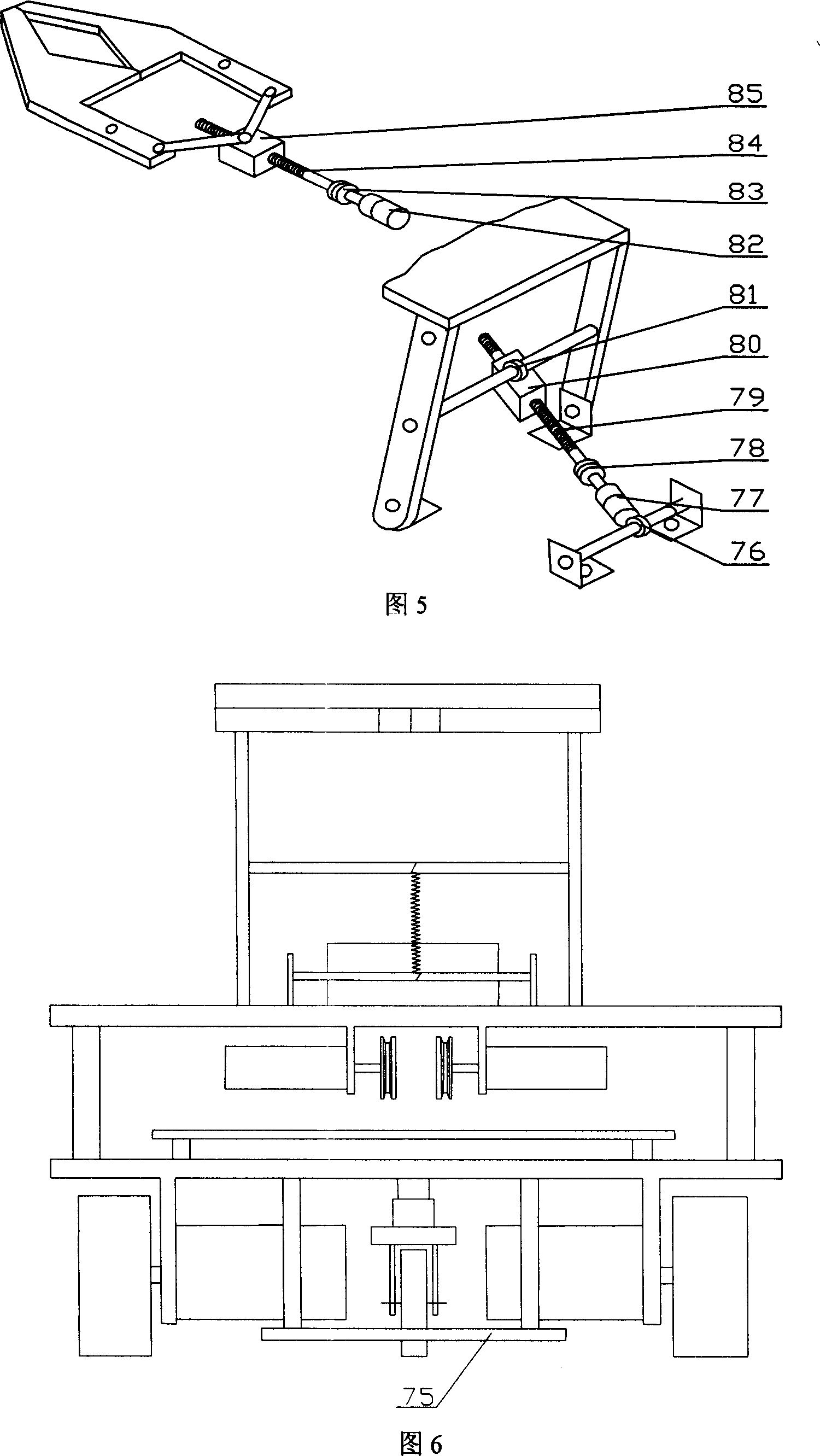
[0038] The mechanical structure of this embodiment is exactly the same as that of the first embodiment. The difference in the electronic part is that: the power supply interface 31 and the control signal input interface 32 of the main control board are connected to the hunting board 75 located under the chassis platform 22 through a flat cable. The power supply interface and signal interface on the computer constitute a line hunting robot, as shown in Figure 6. The layout of the components on the hunting board is shown in Figure 7. The hunting board is arranged with four light-emitting diodes 86 for detecting signal indication, four light-emitting diodes 92, four photosensitive resistors 91, adjustable resistors 90, LM324 chips 89, Components such as the detection signal interface 87 and the power supply interface 88, among which the four light-emitting diodes in the upper right corner are the light-emitting diodes 86 for detection signal indication, which are used to indicate the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More