

Wrist driving structure for industrial robot
An industrial robot and wrist technology, applied in the field of industrial robot wrist drive structure, can solve the problems of large moment of inertia of the wrist unit and difficulty in improving responsiveness, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
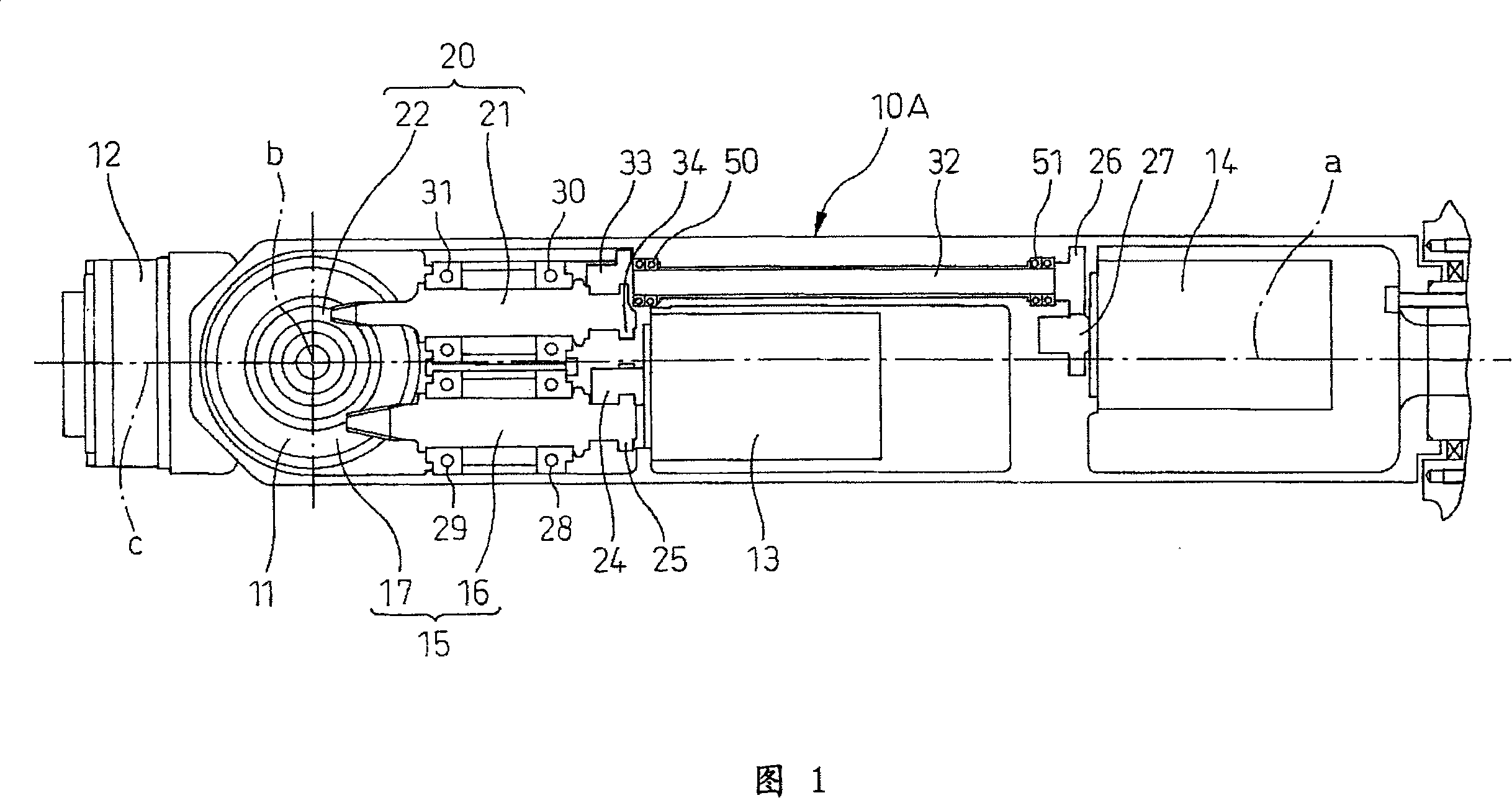
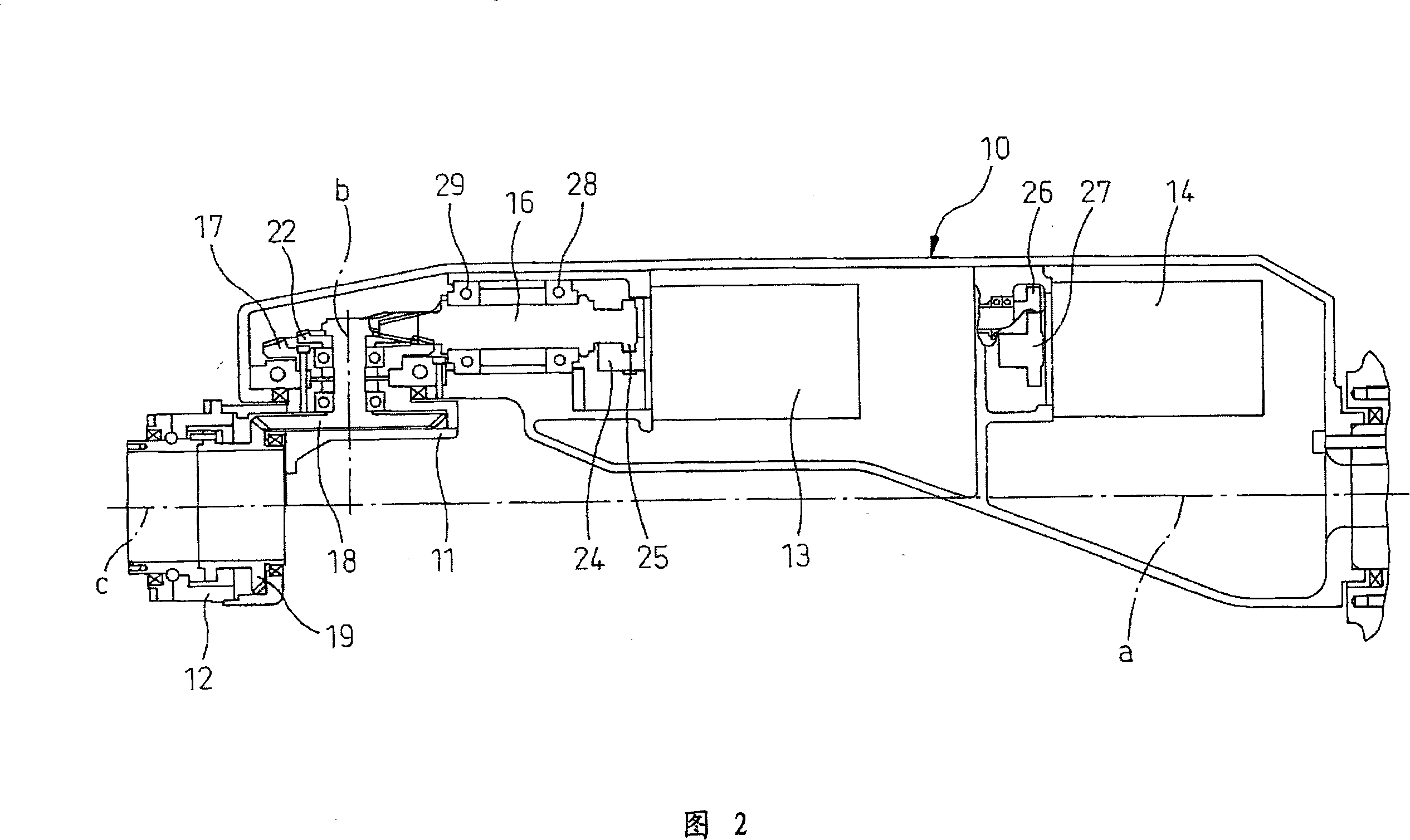
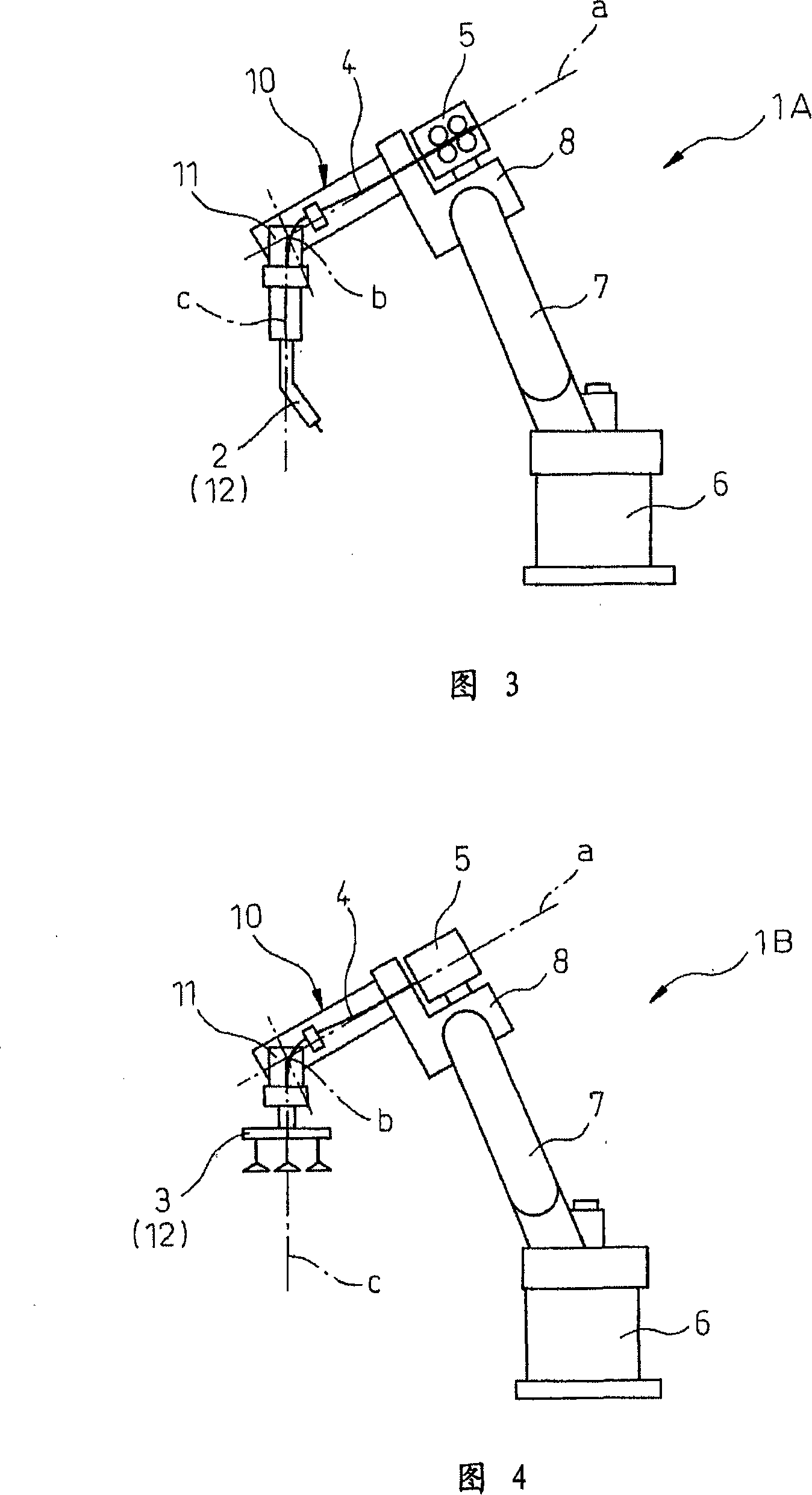
[0019] Specific examples of embodiments of the present invention will be described in detail below with reference to the drawings. 1 and 2 show a first embodiment of the drive structure of an industrial robot arm according to the present invention. 3 and 4 show overall views of an industrial robot to which the arm drive structure of this embodiment can be applied.
[0020] As shown in Fig. 3 and Fig. 4, industrial robot 1A, 1B shown as an example is a robot with degrees of freedom of orthogonal six axes, Fig. 3 is an arc welding robot equipped with welding torch 2 as the wrist unit of the final axis, Fig. Reference numeral 4 is a transfer robot that also includes the manipulator tool 3 . In the arc welding robot 1A, the welding torch 2 is connected to a line 4 for bundling signal cables, power cables, welding wire, gas hoses, welding wire conduits, and the like. In the transfer robot 1B, the manipulator tool 3 is connected to a pipe 4 that bundles signal cables, power cables...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More