

Submarine manipulator shoulder joint
An underwater manipulator and shoulder joint technology, which is applied to manipulators, underwater operation equipment, ships, etc., can solve the problems of unfavorable hydraulic oil pipe pipeline layout, large volume of manipulator, and non-compact structure, and achieves favorable pipeline layout and rotation. Flexible, compact effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
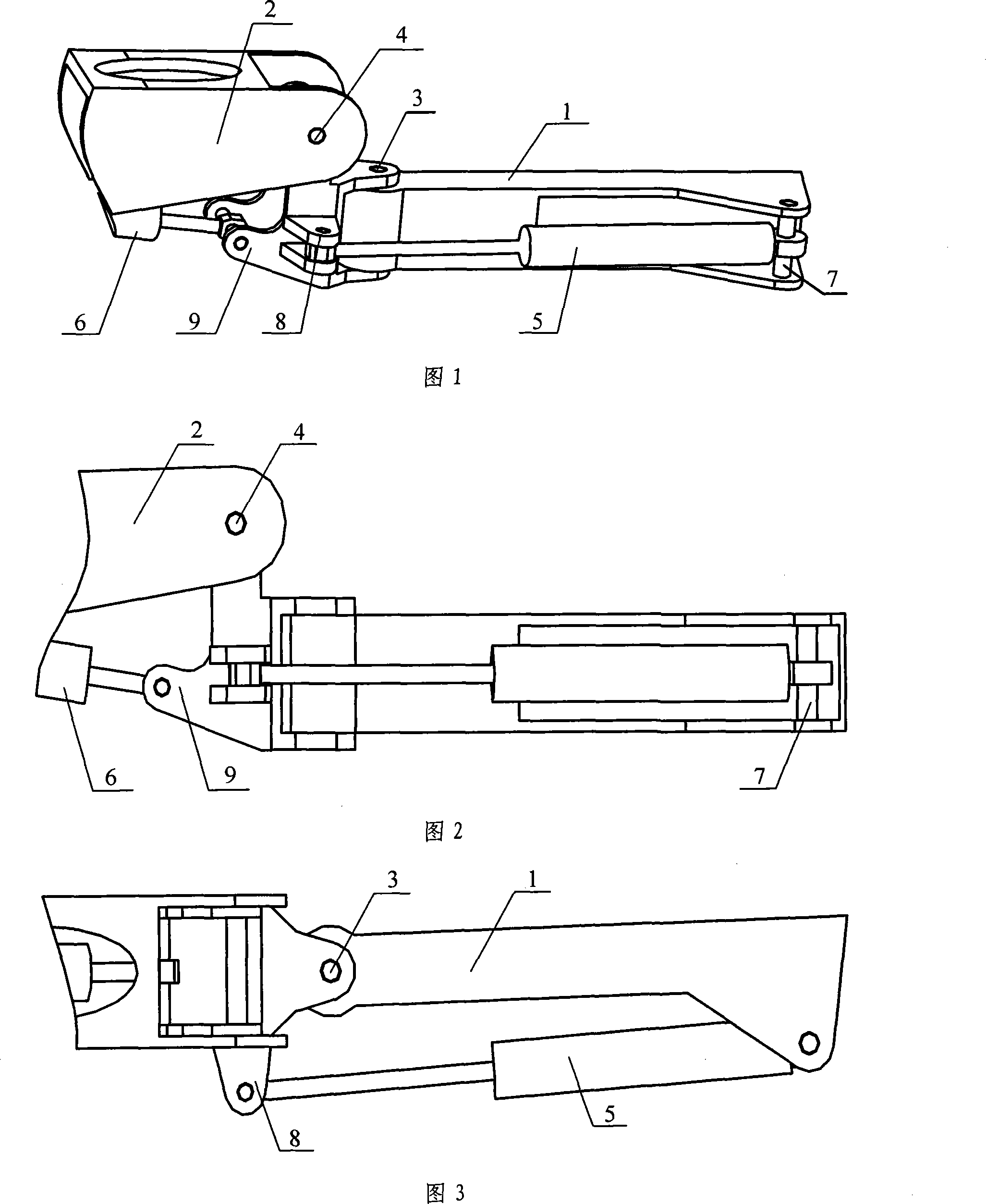
[0016] The present invention is described in more detail below in conjunction with accompanying drawing example:
[0017] Combined with Figures 1-3, the shoulder joint of the underwater manipulator is connected by a base frame 1, an upper arm 2, a yaw shaft 3, a pitch shaft 4, a hydraulic cylinder 5, a hydraulic cylinder 6, a hydraulic cylinder bottom connecting shaft 7, and a hydraulic cylinder piston rod. The hinge seat 8 and the hydraulic cylinder piston rod joint hinge seat 9 are composed of the base frame 1 and the shoulder joint through the yaw shaft 3, and the upper arm 2 is connected with the shoulder joint through the pitch shaft 4; the bottom of the hydraulic cylinder 5 is connected through the bottom of the hydraulic cylinder. The end connecting shaft 7 is connected with the base frame 1, the piston rod end of the hydraulic cylinder 5 is connected with the shoulder joint through the hydraulic cylinder piston rod connecting hinge seat 8; the piston rod end of the hydr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More