

Escalator or moving pavement driving device
A technology of moving walks and driving devices, which is applied to escalators, energy efficiency, transportation and packaging of escalators. It can solve the problems of high energy consumption, short operating life, and large mechanical wear, and achieve high transmission efficiency and long operating life. The effect of long length and high motor efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
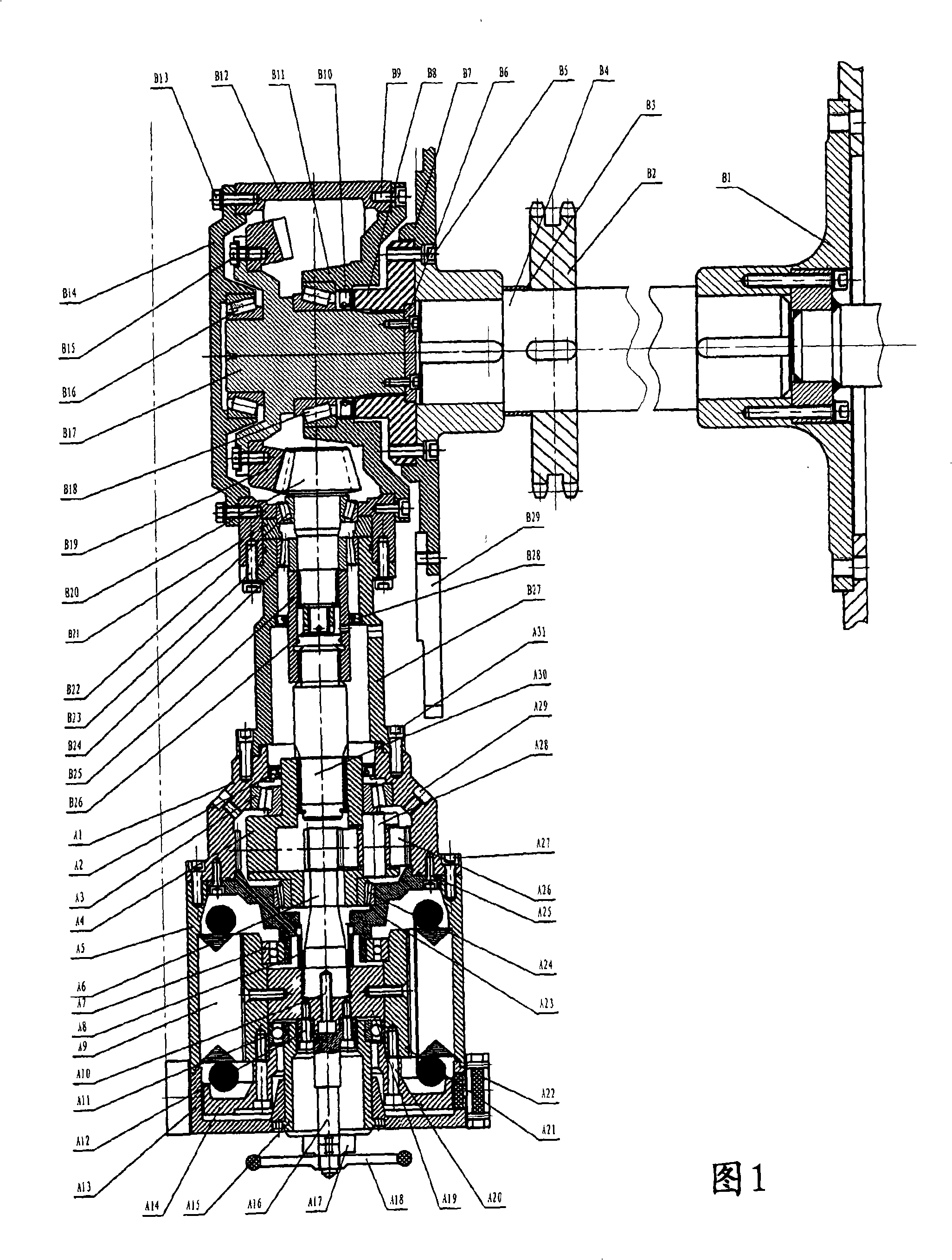
[0019] The main reference signs of the present invention are as follows
[0020] A1, ring gear housing; A2, primary lip seal; A3, front bevel gear; A4, planet carrier; A5, motor housing; A6, sun gear shaft; A7, motor front bearing; A8, mechanical seal; A9, Stator winding; A10, sun gear shaft fixing bolt; A11, motor rear bearing; A12, auxiliary shaft extension fixing bolt; A13, motor rear cover; A14, brake wheel; A15, rear hollow wheel; A16, auxiliary shaft extension; A17 , Encoder; A18, Turning handwheel; A19, Rotor triple inner spline body; A20, Brake wheel connecting bolt; A21, Permanent magnet rotor; A22, Brake; A23, Rear sealing cover; A24, Rear tapered bearing; A25, rear sealing cover fixing bolt; A26, planetary gear; A27, connecting bolt; A28, planetary gear shaft; A29, oil injection and drain bolt; A30, two-way spline connecting shaft;
[0021] B1, the right sprocket assembly; B2, the driving sprocket of the armrest belt; B3, the positioning sleeve; B4, the main drive ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More