

Method for accurately positioning vision in cleaning robot of condenser
A cleaning robot and precise positioning technology, applied in the fields of instruments, cleaning heat transfer devices, photogrammetry/video surveying, etc., can solve the problems of lack of feedback information, affecting cleaning effect, deviation between input and expected value, etc., and achieve calibration Precise, improved cleaning results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
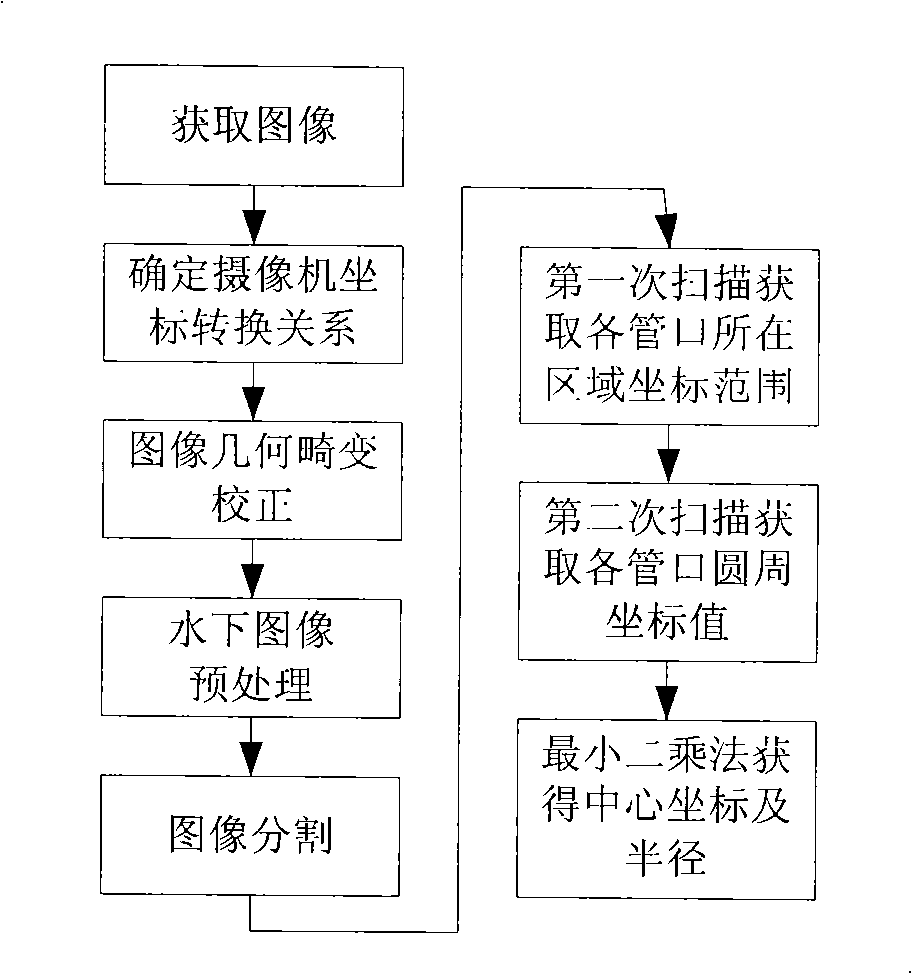
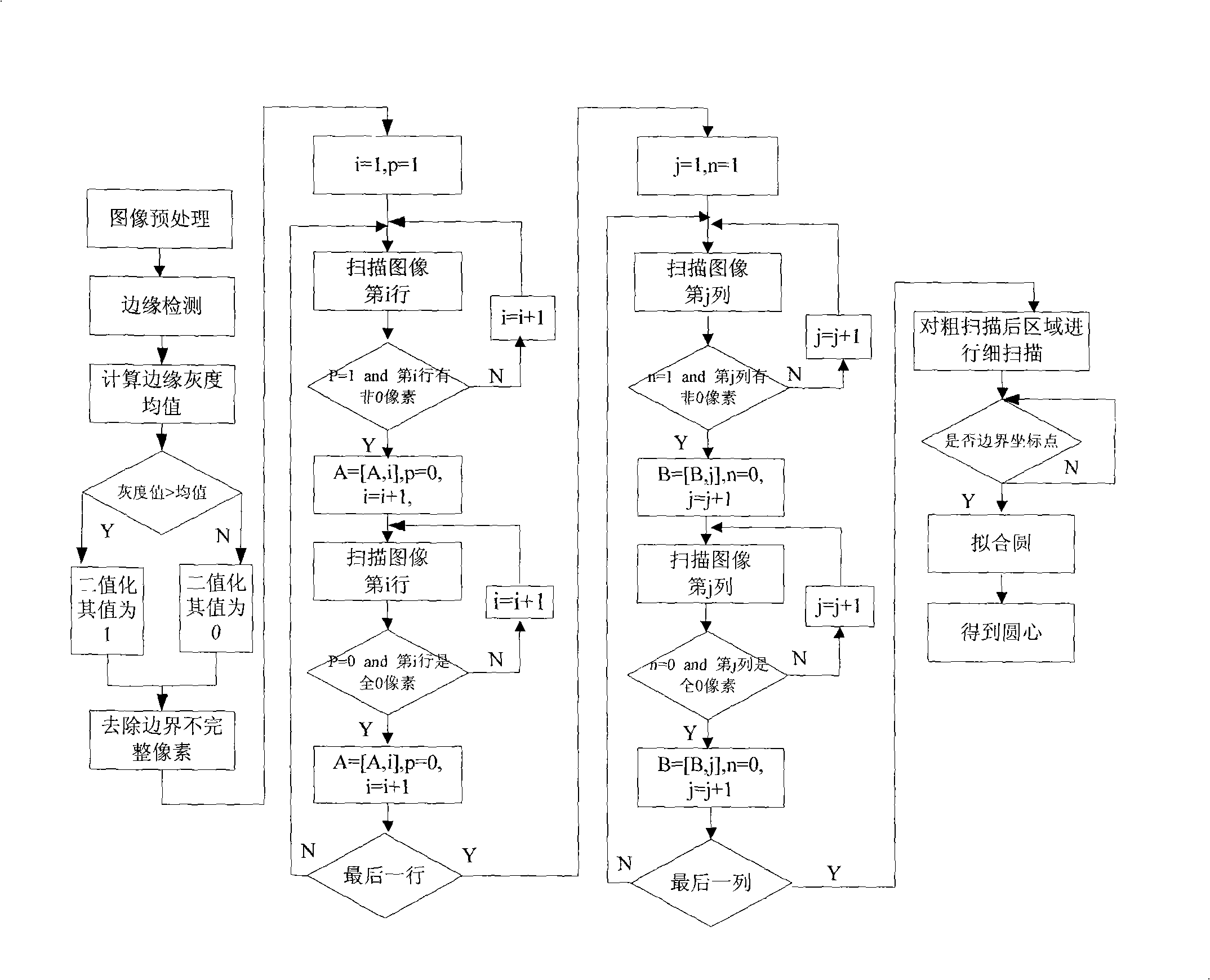
[0041] The following will combine Figure 1~5 And specific embodiment is described in further detail. This embodiment specifically includes the following steps (such as figure 1 and image 3 ):
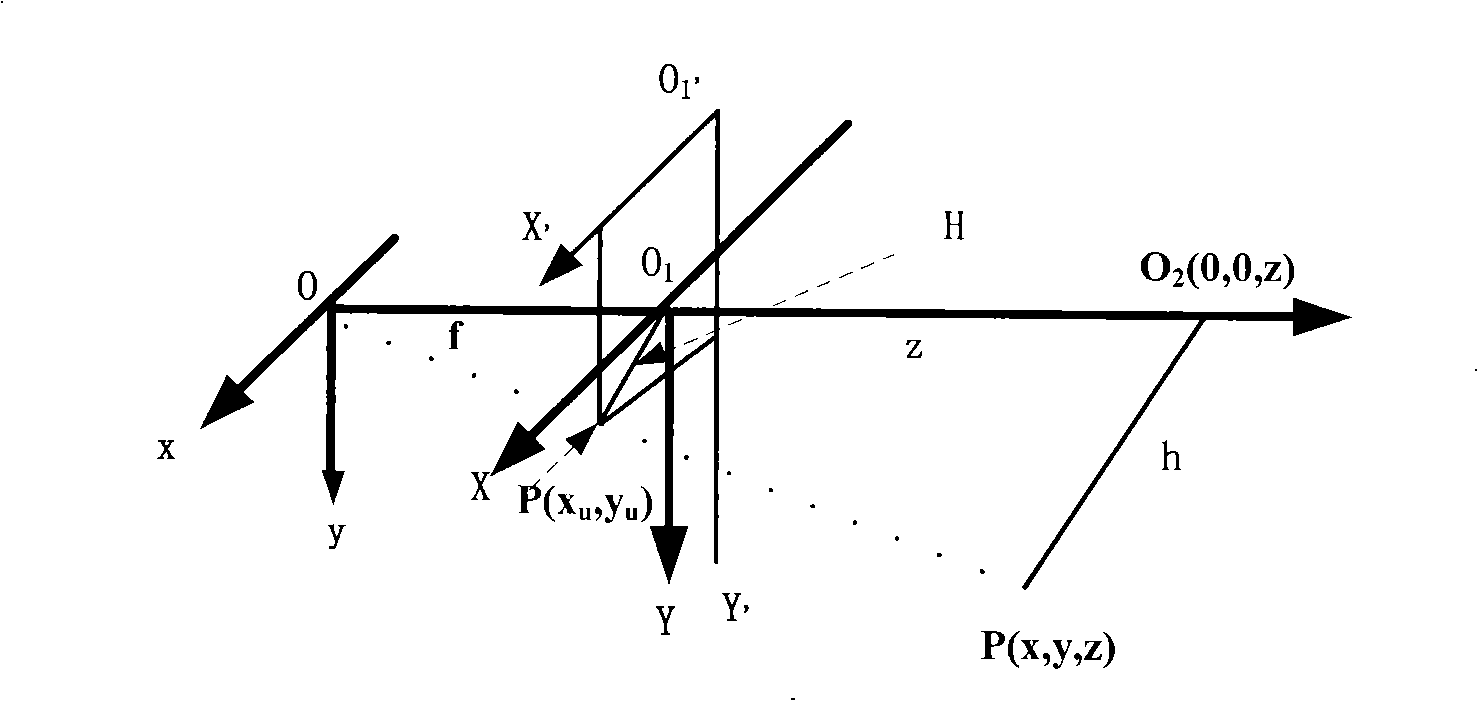
[0042] 1) Get the image and build the distortion model
[0043] The image of the nozzle of the condensation pipe is collected by a high-speed camera (at this time, there are n nozzles in an image). The analog image is converted into a digital image by the image acquisition card and sent to the industrial computer for processing. Usually, the images acquired by the camera adopt the pinhole imaging model, but in practical applications, due to the distortion of the camera lens and the influence of assembly errors, the image of the distribution of the condensation pipes obtained by the shooting is distorted, especially for short focal length and wide-angle lens cameras. The edge of the center of the lens has larger distortion. There are two types of geometric distortion of the lens, r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More