

Multi-structured light binocular composite vision weld joint tracking method and device
A tracking device, multi-structure technology, used in auxiliary devices, welding equipment, welding equipment and other directions, can solve the problems of low precision, unable to eliminate leading errors, poor anti-interference ability, etc., to eliminate leading errors and improve anti-interference. Performance, compact effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
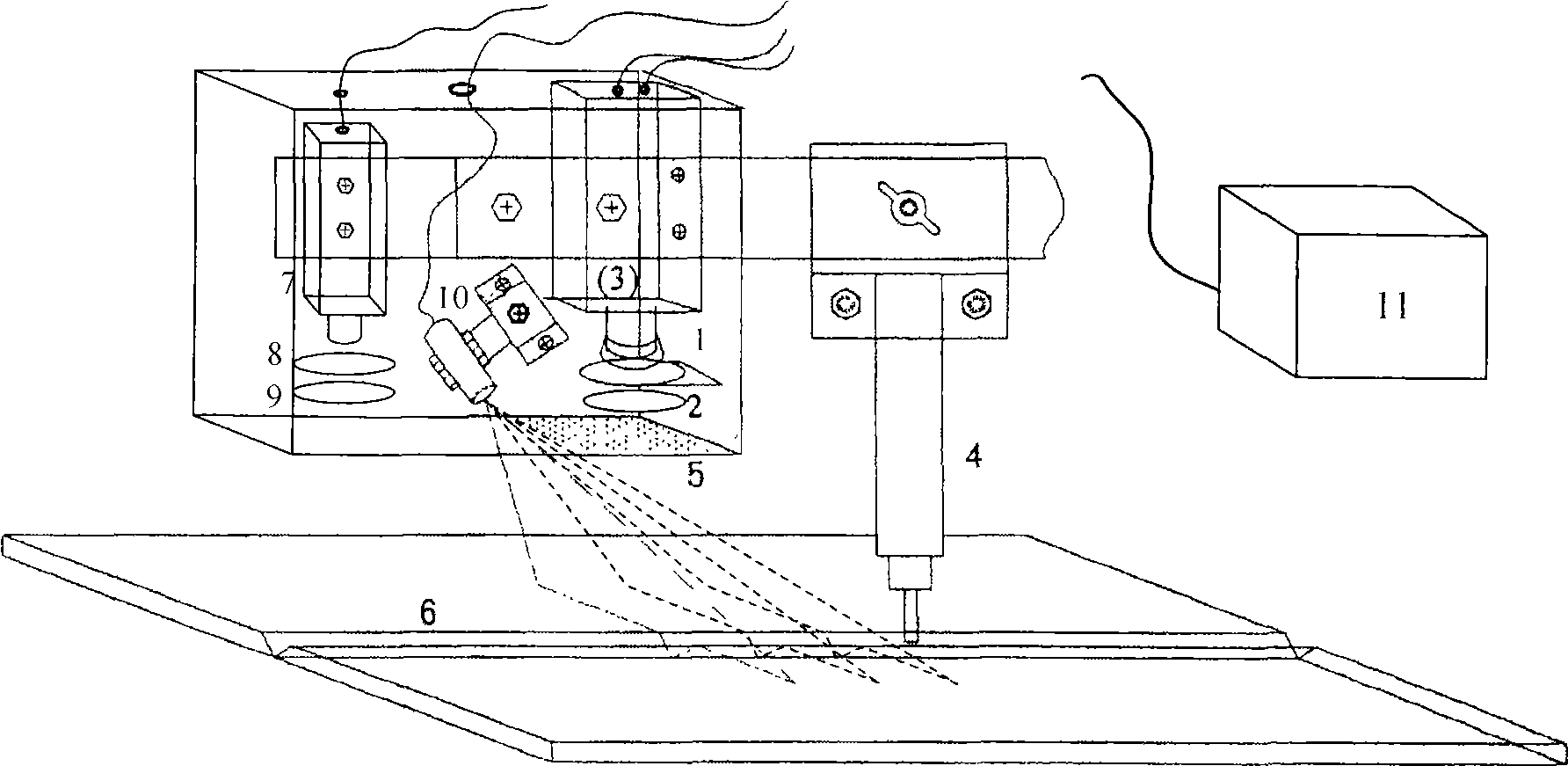
[0017] Such as figure 1 As shown, the multi-structured light composite visual welding seam tracking device of the present invention includes a narrow-band filter 1, a neutral light-reducing film A, a camera A, a splash guard 5, a camera B, and a band-pass filter 8 (which can transmit light wave with a wavelength of 650nm), a neutral light reduction film B, a multi-line laser 10, and a controller 11. Both cameras are industrial cameras. Among them, the laser and the camera are packaged together, and are rigidly connected to a frame with the welding torch 4. The camera head is equipped with a light reduction sheet and a light filter, and the welding seam tracking device is fixedly connected to the welding torch. The plane intersects the plane formed by the welding seam and is perpendicular to the surface of the workpiece to be welded; the camera is connected to the controller cable through the signal line.
[0018] Above-mentioned controller 11 comprises computer and parts the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More